自律移動ロボット
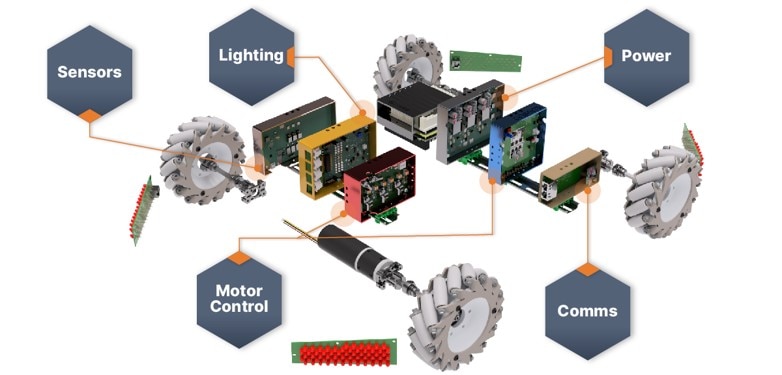
onsemiの自律移動ロボットのコンセプトは、onsemiの高効率で革新的なソリューションで設計された包括的なロボティクスソリューションです。このコンセプトは、onsemiの多様なインテリジェント電源ソリューションを組み合わせることで、さまざまなタイプのロボット、コボット、電動工具、自律走行車などの設計に利用できます。
- BLDCモータ制御キット
- バッテリ充電と電力変換
- イメージセンサとLiDARソリューション
- コネクティビティソリューション
- LED照明
- 産業用コボットとロボット
- 倉庫ロボット
- 配送ロボット
- パワーツール
- 農業用ロボット
- 芝刈り機
- 自律走行車

自律型移動ロボットの動画 -

2024年Embedded Worldインタビュー -

技術について語る:ロボティクスと物理AI -
- BLDCモータ制御ソリューション
- センシングソリューション
- パワーソリューション
- 照明ソリューション
- 通信ソリューション
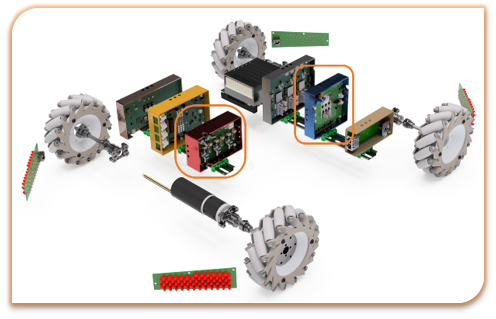
BLDCモータ制御ソリューション
まず、BLDCモータ制御ソリューションがあり、実際には3つの異なるプラットフォームを選択することができます。最初のものは、当社のecoSpinをベースにした統合型モータ開発シップです。これはモータBLDC制御のための完全に統合されたソリューションです。これにはブートストラップダイオードが統合されています。センスアンプ、ゲートドライバ、マイクロコントローラも同様です。ファームウェアが利用可能です。
2番目のソリューションは、ディスクリートゲートドライバとMOSFETを使用するXilinxベースのシステムです。モータ制御レベルでより高い演算能力が必要なプラットフォームに使用できます。
そして最後の1つが、電動工具ベースのソリューションです。
おすすめの製品




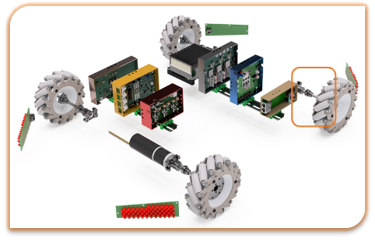
センシングソリューション
自律型ロボットは、自分がどこに向かっているのかを確認する必要があるため、イメージセンサとカメラモジュールが必要になります。このデモでは、E-con USBカメラモジュールを使用しています。これは、自律型ロボットに理想的なグローバルシャッターイメージセンサを使用しています。グローバルシャッターセンサは、各画像のピクセルデータを同時に保存します。このタイプのセンサは、ローリングシャッターセンサに見られるモーションアーチファクトがないため、工場や倉庫の床を動き回る場合に理想的です。ローリングシャッターセンサは、グローバルシャッターセンサよりもダイナミックレンジが広いので、照明条件が極端に異なる場合に有効です。しかし、工場で働く自律型ロボットにとって、こうした照明条件は、グローバルシャッターセンサの使用を許容するには適しています。AR0234CSイメージセンサは、毎秒60フレームのフレームレートでフルHD画像をサポートします。
可動アームを持つ自律型ロボットは、サーボモータを使ってアームやグラバの位置を制御します。これには正確な位置フィードバックが必要です。さらに、自律型ロボットの電源がオフになり、再びオンになる場合は、アームの正確な位置を知ることは重要です。絶対位置センサは、いつでもアームの位置を決定することができます。光センサでもこのようなことが可能ですが、多くの外部部品を必要とし、温度の変化に対しても敏感です。onsemiは、自動車市場向けに高信頼性のカスタム位置センサを提供する定評あるサプライヤです。こうした経験から、当社はNCS32100センサコントローラを使用したデュアル誘導位置センサソリューションを開発しました。この製品については、このプレゼンテーションの後半でもう少し詳しく説明します。
おすすめの製品






パワーソリューション
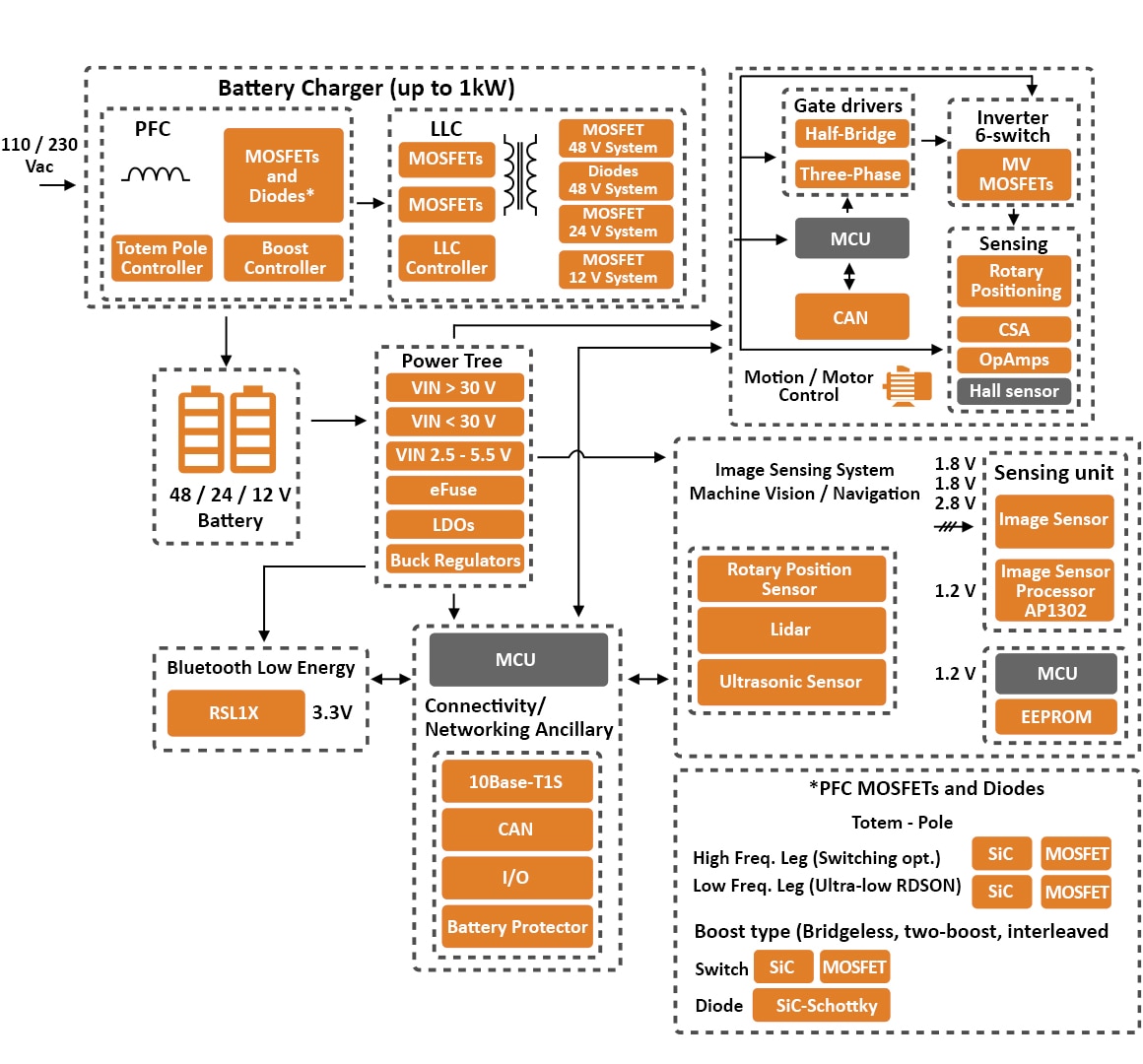
自律型ロボット向けの電源を見てみましょう。確かにバッテリから電源が供給されていますが、バッテリはある時点で充電する必要があります。自律型ロボットは、充電ポイントまで駆動するためのインテリジェンスを備えています。外部ロボットアームは電源ケーブルを自律型ロボットに接続し、ロボットを充電します。
自律移動ロボット用の600W AC主電源入力バッテリ充電器は、PFCステージ、絶縁型LLCコンバータ、降圧コンバータの3つのセクションで構成されています。PFCステージは、NCP1632 PFCコントローラを使用したデュアルインターリーブPFCステージです。これにより、ACラインから引き出される電力の力率が良好になり、全高調波歪みが低くなります。LLCステージは、センタータップのハーフブリッジトポロジを備えたLLCトポロジを使用して、400VDCなどのPFCステージの出力を48V DC出力電圧に変換します。現在の設計ではNCP1399が使用されており、新しい設計では、より高度なNCP13994が推奨されます。その出力は、2つのNCP4305D同期整流コントローラによって制御される2つのFDMS86202ETミディアム電圧MOSFETを使用して同期整流されます。
バッテリ充電プロファイルには定電流充電モードがあり、幅広い動作電圧に対応します。LLCステージは、電圧変換比(ゲイン)の動作範囲が狭いため、定電流モードではうまく動作しません。自律型ロボット充電器では、FAN65008を使用した第3の降圧ステージがあり、非常に幅広い電圧変換比で動作するため、バッテリ充電に必要な電流および電圧プロファイルを簡単に提供することができます。
おすすめの製品

ドライバ汎用パワーMOSFET 10-DFN(4 x 4)")

291W(Tc)スルーホールTO-247-3")





、102A(Tc)3.3W(Ta)、187W(Tc)面実装 8-PQFN(5x6)")

照明ソリューション
この自律型ロボットソリューションは、LEDライトを装備しており、人や他のロボットにその存在を示すことができます。追加のLEDライトは信号伝達に使用されます。onsemiは、ヘッドライト、テールライト、デイタイム走行ライト、シグナルライトソリューションを自動車および産業車両市場に提供する定評あるサプライヤです。今回は、この幅広いポートフォリオから2つの製品を選び、自律型ロボットに使用しました。
NCV7685車載用テールLEDライトソリューションは、使いやすいドライバ+統合MOSFETソリューションです。I2Cインターフェース経由でPWM制御される12個の並列60mAチャンネルがあります。設計者が外部マイクロコントローラなしでLEDドライバを動作させたい場合は、特定のOTPレジスタを事前にプログラムしてデューティサイクルを設定できます。LEDドライバには、電流を設定するピンの短絡状態、I2C通信のエラー、熱警告、サーマルシャットダウン、開放負荷状態などの特定のエラーを検出するために、マイクロコントローラが読み戻すことができる障害診断機能が備わっています。この情報はマイクロコントローラによって使用され、ローカル自律型ロボットを監視している中央ホストコントローラにエラーを通知するなど、必要な修正アクションをサポートすることができます。
おすすめの製品

NCV7685DQR2G
詳細を見る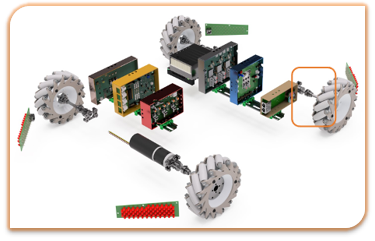
通信ソリューション
従来、ロボットメーカーは、ロボット内のさまざまなノード(BLDC、照明、プロセッサ、一部のセンサなど)間の有線通信に、自動車用CANプロトコルを選択してきました。CANは、マルチドロップまたはデイジーチェーントポロジで、軽量かつ低コストのシールドなしツイストペア(UTP)配線を使用して、ノード間で2Mbps~5Mbpsの通信を可能にする技術として数十年にわたり利用されてきました。一方、ロボットがより自律性を高めたり、人間とより密接に協働するようになるにつれ、ロボットの知能を強化する必要性が生じています。ロボットの知能は、LIDAR、イメージセンサ、超音波、レーダ、誘導測位などの処理能力とセンサをロボットに追加することによって向上します。イメージセンサとLiDARは、ギガビットEthernetなどのより高速なデータレートを必要とするプロセッサノードへのポイントツーポイント(p2p)通信リンクを促進します。CANの欠点の1つは、EthernetとCANの間にゲートウェイが必要である点です。これは、両者のプロトコルが異なるためです。
2019年、Ethernet Allianceは、CANの「オールEthernet」の代替として、10BASE-T1SのIEEE802.3cg標準を承認しました。10BASE-T1Sは、同じ2本のワイヤ(SPE、シングル ペア イーサネット)でCANの2~3倍速の通信を可能にし、onsemiのNCN26010またはNCN26000コントローラを使用することでゲートウェイの追加コストと重量を削減できます。











