メイカーのためのモータ - パート1:Adafruitキットでヘッドの動きの問題を解決
正直に告白すると、私は今、ちょっとした問題を抱えています。というのも、私の趣味的なプロジェクトのいくつかに動きを加えることにしたのですが、さまざまな種類のモータやアクチュエータを選んで実装することに関しては、やや初心者だからです。また、トルクやギア比などの決め方にも詳しくありません。
大学の授業でこの種の講義を受けたことは覚えていますが、それは1970年代後半の、エレクトロニクスの黎明期のことで、私自身の人生でも40年以上も前のことですので、(教授たちは有益なことをいろいろ教えてくれたはずですが)残念ながらあまりよく覚えていません。
私はいつも、「点滅するLEDを見せられたら、よだれが出てしまう」と言っています(どうぞ「時代遅れ」と言ってください)。そのため、私の趣味のプロジェクトの第1弾は、3色のLEDを目にしたロボットヘッドです。最初は、安くて楽しく遊べる(手っ取り早いとも言える)プラットフォームを作りたいと思っていたので、木と厚紙をホットボンドでつなぎ合わせたものを作ってみました。
しばらくの間、私の世界(蝶はより大きく、花はより鮮やかで、鳥はより美しく歌う世界)は、すべて順調に進んでいました。しかし、友人の一人が「動きを加えればもっとすごくなる」と言ったのです。具体的には、「目を左右上下に動かしたりしてはどうか」と提案されました。また、ヘッド全体を左右や上下に動かしたり、左右に傾けたりすることも提案されました。
これらについて考えると、市販されているさまざまなタイプのモータやアクチュエータの中から選定を行う知識を私がほとんど持ち合わせていないという現実に引き戻されます。ブラシ付きDCモータ、ブラシレス3相モータ、ステッピングモータ、サーボ、リニアアクチュエータなどの大まかな違いは理解しているつもりですが、ロボットヘッドなどの各種用途にどれを使えばいいのかは、よくわかりません。
サーボから始める
各用途に適した部品を選定するにはある程度のリサーチが必要で、それは今後のブログで紹介することになるでしょう。一方で、何か遊び始めるきっかけになればと思い、Adafruitの 1967ミニパン/チルトロボティクスキットを2つ注文しました(図1)。
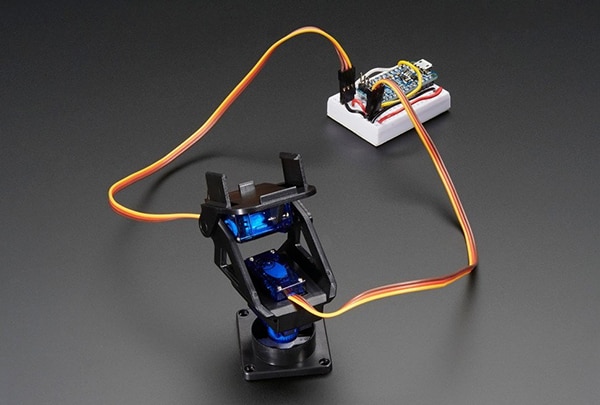 図1:完全に組み立てられた状態で提供される1967パン・チルトキットには、2種類のマイクロサーボ(SG-90またはSG-92タイプ)のいずれかが搭載されており、左右180°のパンと上下150°のチルトが可能です。(画像提供:Adafruit)
図1:完全に組み立てられた状態で提供される1967パン・チルトキットには、2種類のマイクロサーボ(SG-90またはSG-92タイプ)のいずれかが搭載されており、左右180°のパンと上下150°のチルトが可能です。(画像提供:Adafruit)
マイクロコントローラのデジタル出力ピンを使ってPWM(パルス幅変調)でサーボを直接制御できることは知っていますが、私はこれまで、マイクロコントローラと外界との間を、FET(電界効果トランジスタ)程度の形の絶縁であってもいいので、絶縁したいと考えてきました。
最終的な実装でサーボモータを使用するとなると、片方の目で最低でも2個、メインとなるヘッドでは最低でも3~4個のサーボを制御しなければならないことになります。そこで私は、Adafruitの16チャンネル、12ビットPWMドライバボードの1つである815を購入することにしました(図2)。
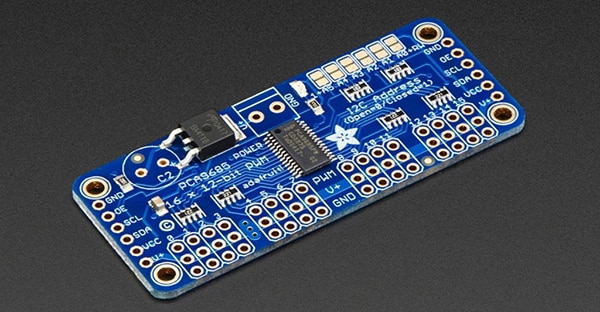 図2:I2Cインターフェースにより、わずか2本のマイクロコントローラピンでLEDとサーボモータの両方を制御することができる、16チャンネルのPWMボードです。(画像提供:Adafruit)
図2:I2Cインターフェースにより、わずか2本のマイクロコントローラピンでLEDとサーボモータの両方を制御することができる、16チャンネルのPWMボードです。(画像提供:Adafruit)
このボードの優れた点は、I2Cインターフェースを使って制御するため、マイクロコントローラのデジタル出力ピンが2本しか必要にならないことです。16個のPWM出力はそれぞれ、LEDまたはサーボモータの駆動に使用することができます。
ブラシレスDCモータ
また、ひょんなことから、モータのノウハウを必要とする別のプロジェクトについて思案するようになりました。きっかけは3~4年前、ある友人が往年の素晴らしい可変コンデンサをプレゼントしてくれたことでした(図3)。
 図3:この可変コンデンサは、固定されたステータを形成する1組の金属板と、可動性のあるローターを形成するもう1組の金属板を交互に配置し、誘電体として空気を使用しています。(画像提供:マックス・マックスフィールド氏)
図3:この可変コンデンサは、固定されたステータを形成する1組の金属板と、可動性のあるローターを形成するもう1組の金属板を交互に配置し、誘電体として空気を使用しています。(画像提供:マックス・マックスフィールド氏)
空気誘電体を使った可変コンデンサは、ハンガリー人エンジニアのデジェー・コルダが発明し、1893年にドイツで特許を取得したものです。
約30 x 30 x 30cmの立体エリアを占めるこのデバイスは、見た目にも美しいものです。主構造は異種金属で形成されており、コンデンサを形成する構造は、絶縁ガラスのセパレータによってフレームから電気的に分離されています。今でも製造されているかどうかはわかりませんが(製造されていない気がします)、もし製造されているとしたら、新しいものを買う場合にいくらかかるかと思うとゾッとします。
友人は私に渡す前に、このコンデンサを木製の台座に取り付け(私はもっと立派なものに交換するつもりです)、360°連続して回転できるようにエンドストッパを外し、モータとドライブベルトを付けていました(写真右下)。
恥ずかしながら、この大作はここ数年、私のオフィスの本棚の上で埃をかぶっていました。2週間ほど前にたまたま目にして、「これを使って何かしなければならない」と思ったのです。
正直なところ、内部のモータを見てワイヤが3本あることを知るまでは、それほど問題になるとは思っていませんでした。「やれやれ」と思いました。友人に電話して確認したところ、これは12Vの3相ブラシレスモータだそうです。このタイプのモータを採用したのは、音が非常に静かで、電気代もわずかで済むからだそうです。そういった問題が片付いたところで、今度はこの機械の速度と回転方向を制御する方法を見つけなければなりません。
まとめ
私は物事に飛びつく質で、今後の趣味のプロジェクトでは動きが重要になってくると感じたので、モータやアクチュエータの勉強を始めようと思っています。Adafruitの1967パン・チルトキットと817 PWMボードは、手始めに使うには非常に便利で、今後のプロジェクトでも使うことになると思います。
また、マシュー・スカルピノ著『Motor for Makers: A Guide to Steppers, Servos, and Other Electrical Machines(メイカーのためのモータ:ステッピング、サーボ、その他電気機械のガイド)』という本も注文しました。
詳しくは、今後のブログで報告します。それまでの間に、なにか共有したいアイデアはありませんか。いつものように、コメントやご質問、ご意見をお待ちしています。
著者について

Clive "Max" Maxfield氏は、1980年にイギリスのシェフィールドハラム大学で制御工学の理学士号を取得し、メインフレームコンピュータの中央処理装置(CPU)の設計者としてキャリアをスタートしました。Maxは長年にわたって、シリコンチップから回路基板まで、果ては脳波増幅器からスチームパンクな予測エンジンまであらゆる設計に携わってきました(細かいことは聞かない)。彼はまた、30年以上にわたってEDA(電子設計自動化)の最前線にいます。
また彼は、『Designus Maximus Unleashed』(アラバマ州で発禁)、『Bebop to the Boolean Boogie』(型破りなエレクトロニクス界へのガイド)、『Where Electronics Begins』(EDA関連)、『Instant Access』(FPGA関連)、『How Computers Do Math』(同)をはじめとする多くの書籍の著者や共著者として活動しています。彼のブログ Max's Cool Beans をチェック!

Have questions or comments? Continue the conversation on TechForum, Digi-Key's online community and technical resource.
Visit TechForum




