協働ロボットの安全性を評価する際の重要な考慮事項とは?
DigiKeyの北米担当編集者の提供
2024-04-03
協働ロボット(コボット)は人間と協働し、インダストリ4.0ファクトリでの柔軟な生産をサポートするように設計されています。従来の産業用ロボットに比べ、協働ロボットはシンプルかつセットアップが簡単で、安全に隔離された作業空間を必要としません。協働ロボットは人間と協働するように設計されているため、衝突検知システム、フォースフィードバック、弾性アクチュエータ、低慣性サーボモータなどの機能を含め、他の産業用ロボットとは異なる作りになっています。
設計が異なるため、協働ロボット用に特別な安全規格が開発されています。国際標準化機構技術仕様書(ISO/TS)15066は、産業用協働ロボットとその作業環境の安全要件を規定しています。これは、ISO 10218-1とISO 10218-2の協働ロボット操作に関する要件とガイダンスを補足するものです。
この記事では、ISO/TS 15066の要件を簡単にレビューし、それらがISO 10218-1および10218-2にどのように適合するかを説明します。次に、協働作業空間をどのように定義するかなど、コラボレーションの複雑さについて考察します。協働ロボットに内蔵されている安全機能のようなロボットの安全性に関連する要素、必要とされる外部安全機能、さらに近接センサ、ライトカーテン、セーフティコンタクトマットなどの典型的な装置について考察します。最後に、協働ロボットの安全上の考慮事項に特化したいくつかのアプリケーションを簡単にレビューします。
産業用ロボットや協働ロボットには、いくつかの重要な安全規格があります。ISO/TS 15066は、産業用協働ロボットシステムと作業環境に関する安全要件を詳述しており、ISO 10218シリーズのような従来の規格の限定的な要件を基礎として補足するために作成されました。ISO 10218-1は一般的なロボットとロボット装置に焦点を当て、ISO 10218-2はロボットシステムと統合に焦点を当てています。米国規格協会/ロボット工業会(ANSI/RIA)のR15.06は、ISO 10218-1およびISO 10218-2をまとめた米国規格です。
コラボレーションの複雑さ
協働ロボットの安全性の詳細に入る前に、コラボレーションを定義しておきましょう。ロボティクスにおけるコラボレーションは複雑で、3つの要素を含んでいます。
- 協働ロボットとは、ANSI/RIA R15.06によれば、「定義された協働作業空間内で人間と直接相互作用するように設計されたロボット」です。
- ISO/TS 15066によれば、協働作業とは「意図的に設計されたロボットシステムとオペレータが協働作業空間内で作業する状態」のことです。
- 最後に、協働作業空間とは、ANSI/RIA R15.06によれば、「生産作業中にロボットと人間が同時に作業を行うことができる、保護された空間内の作業空間」のことです。
突き詰めると、「保護された空間内」の協働作業空間という定義に行き着きます。保護された空間には、協働ロボットに含まれる標準的な安全機能に加えて、安全保護レイヤも含まれています。
協働ロボットに統合される一般的な保護機能には、予期せぬ衝撃、障害物、過剰な力やトルクを監視する、各関節のトルク測定に基づく接触検出システムが含まれます。また、自動ブレーキシステムや、動力を使わずにアームを動かすための手動ブレーキリリースも必要です。
協働ロボットによる人への予期せぬ接触は特に懸念されています。この規格では、人の頭のどこにも接触が起こらないようにすることが定められています。加えて、この規格は身体を29の特定部位に分け、2種類の接触に関する制限を詳述しています。
- 過渡的接触とは、協働ロボットが人に衝突する際の動的な事象です。制限は、場所、慣性、相対速度に基づいています。
- 準静的接触は、体の一部が協働ロボットと表面の間に挟まれたときに発生します。制限は、圧縮効果および締め付け効果に関連する圧力と力に基づいています。
この仕様書は、アプリケーションの考慮事項に基づき、絶対的な制約ではなく、ガイダンスを提供しています。また、人間とロボットの協働は新しい分野であり、研究が進行中であるため、ガイダンスは参考情報であり、現在のベストプラクティスを反映しているとしています。
コラボレーションの連続体
単一の協働アプリケーションは存在しません。人間と協働ロボットは連続した方法で相互作用し、協働することができます。協働アプリケーションは、人が協働作業空間に入るとロボットが動力下で停止するような共存型から、動作中に人が協働ロボットに触れる相互作用的なアクティビティまで多岐にわたります(図1)。
 図1:人間とロボットのコラボレーションには、幅広いレベルの相互作用が含まれます。(画像提供:SICK)
図1:人間とロボットのコラボレーションには、幅広いレベルの相互作用が含まれます。(画像提供:SICK)
リスク評価は、個々の協働アプリケーションの安全性のニーズを特定するために必要です。これには、アプリケーションに関連する危険とリスクの特定、評価、低減が含まれます。ISO 10218には、さまざまな状況において適切と思われる安全機能のリストが含まれてますが、明確な要件はありません。ISO/TS 15066では、協働ロボットのリスク評価にさらなる詳細が挙げられています。いずれの場合も、リスク評価の目的は、協働アプリケーションを安全に実施するために必要な外部の安全デバイスおよび安全システムを特定することです。
リスク評価とロボットの詳細については、「AMRを安全かつ効率的にインダストリ4.0事業へ統合することにより最大の利益を実現」という記事を参照してください。
保護と効率
協働ロボットは安全に操作できるように設計されていますが、保護レイヤを追加することで、協働アプリケーションの効率を向上させることができます。さらなる安全性を確保することなく、人が協働作業空間に入る場合、ISO/TS 15066では、1軸あたりの最大速度は0.25メートル/秒(m/s)と規定されています。ほとんどの協働ロボットにとって、それは非常に遅い速度です。
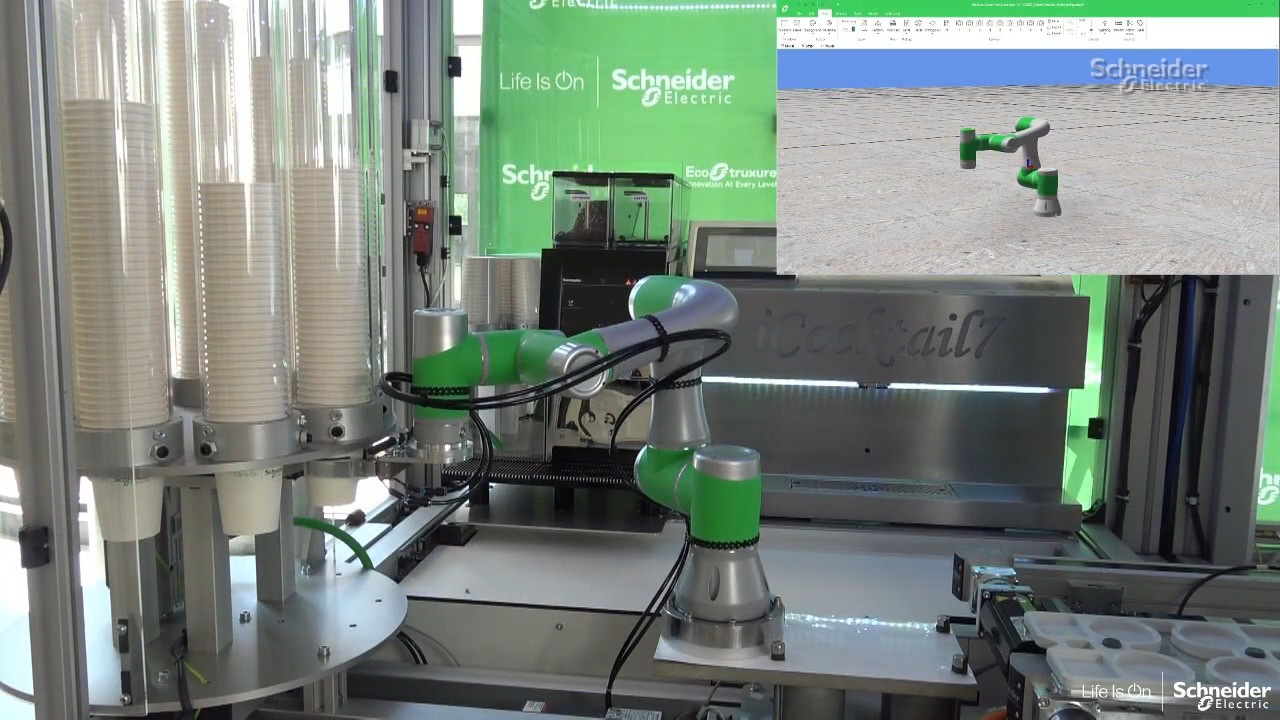
たとえば、Schneider ElectricのLXMRL12S0000 Lexium協働ロボットは、最大可搬質量12kg、動作半径(作業範囲)1327mm、位置決め精度±0.03mm、ツールエンドの最高速度3m/sを実現しており、これはISO/TS 15066で許容される最大速度(人が協働作業空間にいる場合)の12倍です(図2)。
 図2:この協働ロボットは、人が協働作業空間にいる場合、ISO/TS 15066で許容される最大速度の12倍の速度で移動できます。(画像提供:Schneider Electric)
図2:この協働ロボットは、人が協働作業空間にいる場合、ISO/TS 15066で許容される最大速度の12倍の速度で移動できます。(画像提供:Schneider Electric)
多くのアプリケーションでは、協働ロボットは長時間単独で動作します。そのため、協働作業空間に人がいるかいないかを感知することで、人がいないときには、より迅速な操作と高い効率を実現できるようになっています。人の存在を感知する一般的なデバイスには、セーフティスキャナ、ライトカーテン、セーフティコンタクトフロアマットなどがあります。それぞれの技術は異なる利点を提供し、しばしば組み合わせて使用されます。
セーフティスキャナ
セーフティスキャナは、指定されたエリアを監視し、人の存在を検知します。アクティブセーフティゾーンだけでなく、人との距離を判断し、さまざまな警告ゾーンを設定することができます。
OmronのモデルOS32C-SP1-4Mは、協働ロボット用に設計されたセーフティレーザースキャナの好例です。安全半径は最大4mで、最大15mまでの複数の警告ゾーンに対応します。複雑な協働作業空間をサポートするために、70種類の安全ゾーンと警告ゾーンの組み合わせが標準装備されています。さらに、対象物の最小解像度は30、40、50、70mmに設定でき、応答時間は80ミリ秒(ms)から最大680msの範囲で調整でき、アプリケーションの柔軟性をさらに高められます(図3)。
 図3:このセーフティスキャナの安全半径は最大4mで、最大15mまでの複数の警告ゾーンに対応できます。(画像提供:DigiKey)
図3:このセーフティスキャナの安全半径は最大4mで、最大15mまでの複数の警告ゾーンに対応できます。(画像提供:DigiKey)
ライトカーテン
ライトカーテンは人の存在を測定することができ、指や手のようなさまざまなサイズの物体を検出するように設計することができます。セーフティスキャナとは異なり、ライトカーテンは距離を測定しません。リニアエミッタとレシーバアレイの間に一連の光ビームを送り、物体が1つまたは複数のビームを破ったときにそれを感知することができます。
安全性定格の面で言えば、ライトカーテンには主に2つの分類(タイプ2とタイプ4)があります。外見は似ていますが、異なる安全性レベルで設計されています。タイプ4は、協働作業空間を定義する保護された空間を監視します。タイプ2のライトカーテンは、よりリスクの低いアプリケーション向けに設計されています。
ライトカーテンは周囲をガードし、指の検出には14mm、手の検出には24mmといった具合に、数段階の解像度が用意されています。Banner EngineeringのモデルSLC4P24-160P44は、エミッタとレシーバアレイを備えたタイプ4のライトカーテンキットで、人や協働ロボットのような機械を保護するために24mmの解像度を備えています(図4)。エミッタには、同期変調された赤外線発光ダイオードが並んでいます。レシーバには、対応する同期光検出器が並んでいます。エミッタの照射範囲は2mで、ライトカーテンの長さは160mmから320mmまで80mm刻みで設置できます。
 図4:このタイプ4のライトカーテンの解像度は24mmです。(画像提供:Banner Engineering)
図4:このタイプ4のライトカーテンの解像度は24mmです。(画像提供:Banner Engineering)
セーフティレーザースキャナとライトカーテンは、協働作業空間の安全性を高める非接触型の手段を提供します。しかし、不要な光の干渉を引き起こす高反射面のある場所など、光学的に困難な環境での使用は難しく、油脂の漏れや過度のほこりや湿度によってトリップする可能性があります。
これらの光学センサの中には、ある種の干渉を緩和するのに役立つ感度調整が含まれているものもあります。これらの感度調整は、応答時間を長くしたり、その他の性能を低下させたりする可能性もあります。もう1つの解決策は、セーフティコンタクトマットと光学式検知装置を併用することです。
セーフティコンタクトマット
セーフティコンタクトマットは、ラスタライズされた絶縁層で区切られた2枚の導電性プレートを備え、単独で、または他のタイプのセンサと組み合わせて使用することができます。人がマットを踏むと、上の導電性プレートがへこんで下のプレートに接触し、警告信号を発します(図5)。マットの外側はポリウレタン素材で、滑りにくく、水や汚れ、油にも侵されません。ASO Safety SolutionsのSENTIRマットモデル1602-5533は、1台の監視ユニットに最大10枚のマットを直列に接続し、最大10m2をカバーすることができます。
 図5:踏まれると、セーフティマットの上下の導電層が接触し、警告信号を発します。(画像提供:ASO Safety Solutions)
図5:踏まれると、セーフティマットの上下の導電層が接触し、警告信号を発します。(画像提供:ASO Safety Solutions)
細部に宿る安全性
安全性を保証する唯一の方法などありません。すべての協働アプリケーションは異なっており、その独自の特性とニーズに基づいて処理する必要があります。重要な要素は、アプリケーションがコラボレーションの連続体のどこに位置するかということです(図1参照)。協働ロボットと人間との相互作用が緊密であればあるほど、安全保護が必要になります。
さらに細かいことも考慮することがあります。その一部には以下が含まれます。
- それぞれの場所で、協働ロボットがワークステーションからワークステーションへと移動していないかどうか、詳細なリスク評価を受ける必要があります。同じように見えても、小さな違いが安全性に違いをもたらすことがあります。
- 協働作業空間に他のマシンがある場合、シャットダウンシステムや協働ロボットの安全減速にリンクさせる必要があるかどうかを検討します。
- この記事では、安全関連のハードウェアに焦点を当てましたが、一般的になりつつあるネットワークシステムでは、サイバーセキュリティが、協働ロボットの操作や安全システムへの干渉を防ぐための重要な考慮事項です。
まとめ
協働ロボットの安全性は複雑です。これは、保護された空間内の協働作業空間を定義することから始まり、協働作業のリスクアセスメントを必要とします。ISO/TS 15066やISO 10218シリーズのような規格は重要であり、推奨事項やガイドラインを提供しています。協働ロボットには、衝突検知システム、フォースフィードバック、弾性アクチュエータ、低慣性サーボモータなどの基本的な安全機能が搭載されています。協働作業アプリケーションの仕様によっては、近接センサ、ライトカーテン、セーフティコンタクトマットなどの追加安全デバイスが必要になることもあります。
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、DigiKeyの意見、信念および視点またはDigiKeyの公式な方針を必ずしも反映するものではありません。