FOCモータ制御と高度なセンサの統合により、EVの航続距離不安を軽減し、安全性を高める
DigiKeyの北米担当編集者の提供
2022-01-05
電気自動車(EV)およびハイブリッド車(HEV)(しばしばxEVと呼ばれる)のシステム設計者は、航続距離不安を軽減し、自動車の二酸化炭素排出量を削減するために、1回の充電でより多くの距離を走行できるようにすることを常に求められます。同時に、自動車のより高いレベルの自律性、ユーザー機能、安全性を満たすために、モータ、センサ、関連エレクトロニクス、プロセッサ、ソフトウェアを追加する必要がありますが、同時にコストも削減しなければなりません。
特に、ドア、ウィンドウ、バッテリ冷却ファン、ラジエータファンやポンプなどのモータは、重量が増えるだけでなく、騒音や消費電力を最小限に抑えつつ滑らかな応答性を確保するために、フィールド指向制御(FOC)などの高度な制御アルゴリズムも必要となるため、厄介な問題となります。システム全体の設計作業は、ISO 26262の機能安全要件とAEC-Q100の品質基準も満たす必要があるため、複雑になります。
設計者はこのような課題を解決するために、車載用認定デバイスを利用することで、より高度なハードウェアとソフトウェアを提供し、さまざまな機能の設計と統合を簡素化するとともに、部品点数と全体のフットプリントを削減することができます。
本稿では、EV/HEVの設計者が抱える課題について考察します。さらに、高集積のFOCブラシレス直流(BLDC)モータコントローラと関連する評価ボードを使用して、効率的なEV/HEV用モータの設計を始める方法を紹介します。また、Allegro MicroSystemsが提供する、電流、3次元位置、速度、方向を監視する各種センサも紹介します。
EVが抱えるコスト、安全性、航続距離不安
xEVの設計者が解決しなければならない課題は、車両コスト、安全性、信頼性など多岐にわたり、特に、車両の自律性、1回の充電での走行距離(レンジ不安)、バッテリパックの寿命などの高度化が求められています。
安全性と信頼性を支えるためには、ISO 26262で定義されている先進運転支援システム(ADAS)の機能要件を満たす先進的なセンサが必要です。コストと航続距離を考慮して、設計者は最大800ボルトの高電圧電源レールを採用し、効率性の向上とケーブルの軽量化を図るとともに、バッテリパックの設計も改善しています。
たとえば、バッテリの熱管理の改善は、航続距離の拡大やバッテリ寿命の延長に寄与し、EVやHEVのトラクションインバータの冷却改善は、電力密度やエネルギー密度の向上、車両の軽量化に貢献します。
高集積な半導体デバイスにより、高機能化、軽量化、省スペース化が進む一方で、冷却ファンに必要なBLDCモータは、厳密に制御して効率を高める必要があります。そのためには、FOCのような高度なモータ制御アルゴリズムをモータコントローラのゲートドライバに搭載することが有効です。
高性能冷却
FOCは、電気モータの全回転域でスムーズな動作を可能にし、始動時からフルトルクを発生させることができます。また、FOCによって高速で滑らかなモータの加減速が可能になり、高性能なモーションアプリケーションでの正確な制御に役立ちます。FOCは、500Wまでのさまざまな高性能BLDCモータ用として、高効率で小型かつ静粛な低電圧(LV)ドライバ(DC50V以下)を開発するために利用できます。これらは一般的に、xEVの高電圧(HV)バッテリの冷却ファン、暖房・換気・空調(HVAC)システムのブロワ、HVトラクションインバータ冷却システムの液体ポンプなどに使用されています(図1)。
") 図1:FOCモータコントローラは、LVバッテリの電力を利用して、xEVのHVバッテリやHVトラクションインバータを冷却することができます。(画像提供:Allegro MicroSystems)
図1:FOCモータコントローラは、LVバッテリの電力を利用して、xEVのHVバッテリやHVトラクションインバータを冷却することができます。(画像提供:Allegro MicroSystems)
従来の設計では、FOCはマイクロコントローラを用いて外部センサとともに実装されていました。ダイレクトFOCと呼ばれるこのような設計は複雑で、モータの動作パラメータの測定は外部センサに依存するため、ダイナミックレスポンスが低下する傾向があります。
外部センサを排除することで、FOCの性能向上と低コスト化が可能になります。
FOCを実現するためには、排除されたセンサから得ていた情報も必要であり、その情報はモータ巻線の逆起電力(BEMF)による電圧と電流をモータ端子から抽出することができます。ハードウェアはよりシンプルですが、センサレスFOCの実現には、より複雑な制御ソフトウェアが必要です。
センサレスFOCアルゴリズムは、音響ノイズを最小限に抑えながら、最高の効率と動的応答を可能にします。また、BEMF情報が得られないモータの停止時には、ロバストな開ループ起動を行います。
自動車用冷却ファンとポンプ向けの簡単なFOC
一般的なFOC BLDCドライバでは、ソフトウェア開発者がアルゴリズムを記述してマイクロプロセッサやマイクロコントローラに移植する必要がありますが、Allegro MicroSystemsのA89307KETSR-Jは、センサレスFOCアルゴリズムをゲートドライバに直接統合します。A89307KETSR-Jは、外付けの受動部品がわずか5個(コンデンサ4個と抵抗器1個)であるため、部品表(BOM)の最小化、信頼性の向上、設計の複雑さ軽減も実現します(図2)。
") 図2:標準的なA89307KETSR-J xEVバッテリパック冷却ファンのアプリケーション回路では、5つの外付け部品(4つのコンデンサと1つの抵抗器)が示されています。(画像提供:Allegro MicroSystems)
図2:標準的なA89307KETSR-J xEVバッテリパック冷却ファンのアプリケーション回路では、5つの外付け部品(4つのコンデンサと1つの抵抗器)が示されています。(画像提供:Allegro MicroSystems)
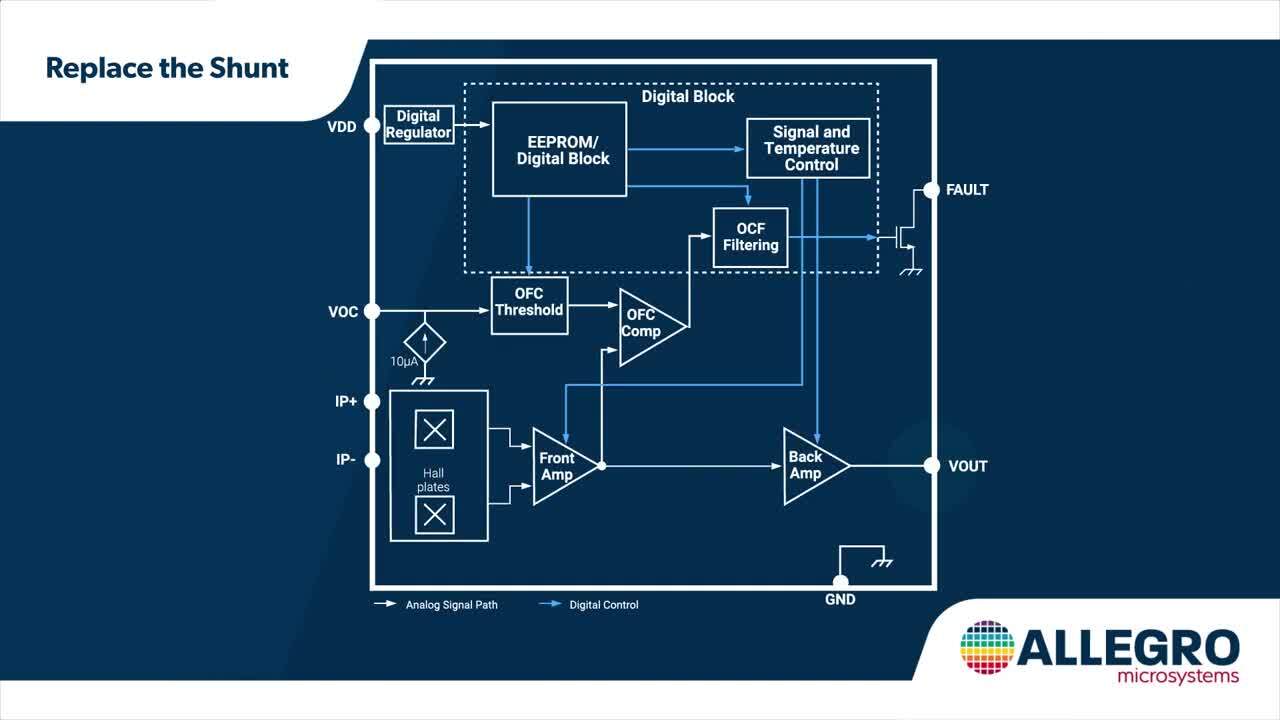
A89307KETSR-Jのゲートドライバは、5.5~50V DCで動作します。統合されたFOCアルゴリズムには、定トルク、定電力、開ループ、定速度の各動作モードが含まれています。A89307KETSR-Jには、パルス幅変調(PWM)またはクロックモード速度制御、ブレーキ、方向の入力および、故障状態やモータ速度の出力信号があります(図3)。
") 図3:A89307KETSR-Jの内部ブロック図には、FOCコントローラ(中央)および、PWMまたはクロックモード速度制御(SPD)、ブレーキ(BRAKE)、方向(DIR)の各入力(左側)、故障(FAULT)およびモータ速度(FG)の各出力(同じく左側)が示されています。(画像:Allegro MicroSystems)
図3:A89307KETSR-Jの内部ブロック図には、FOCコントローラ(中央)および、PWMまたはクロックモード速度制御(SPD)、ブレーキ(BRAKE)、方向(DIR)の各入力(左側)、故障(FAULT)およびモータ速度(FG)の各出力(同じく左側)が示されています。(画像:Allegro MicroSystems)
A89307KETSR-Jは、外付けの低オン抵抗NチャネルパワーMOSFETを駆動するために最適化されています。MOSFETを素早くオン/オフするために必要な大規模なピークドライブ電流を供給することができ、スイッチング時の消費電力を最小限に抑え、動作効率を向上し、熱管理の懸念事項を軽減します。複数のゲートドライブレベルが用意されているため、設計者は電磁妨害(EMI)放射と効率のトレードオフを最適化することができます。MOSFETの高速ターンオンによってスイッチング損失は低減しますが、EMIが増加します。一方、MOSFETの低速ターンオンではEMIが低減しますが、トレードオフとしてスイッチング損失が増加し、効率が低下します。
モータの回転数は、PWM、アナログ、クロックのいずれかの入力で制御できます。閉ループの速度制御もオプションで用意されており、1分間の回転数(RPM)とクロック周波数の比率をプログラムできます。センサレス始動制御には、正および逆プレ回転(ウインドミル)検出および同期が含まれるため、A89307KETSR-Jは、広範なモータおよび負荷の構成で動作することができます。
また、Allegro MicroSystemsの始動時逆回転防止アルゴリズムも起動時のパフォーマンスを向上させます。電源投入後は、逆方向の振動や揺れがなく、モータが正しい方向に起動します。ソフトオンソフトオフ機能では、「オン」コマンドでモータへの電流を徐々に増やし(ウインドミル状態)、「オフ」コマンドでモータからの電流を徐々に減らすことにより、音響ノイズをさらに低減することができます(図4)。
 図4:A89307KETSR-Jのソフトオン(上)とソフトオフ(下)の電流波形により、モータの動作がスムーズになり、音響ノイズが低減されます。(画像提供:Allegro MicroSystems)
図4:A89307KETSR-Jのソフトオン(上)とソフトオフ(下)の電流波形により、モータの動作がスムーズになり、音響ノイズが低減されます。(画像提供:Allegro MicroSystems)
A89307KETSR-Jには、モータの定格電流、電圧、速度、抵抗、始動プロファイルを設定するためのI2Cインターフェースが搭載されています。また、I2Cには、オン/オフや速度制御のほか、速度フィードバックや故障信号も実装されています。
センサレスFOC評価ボード
設計者は、APEK89307KET-01-T-DK評価ボードと関連ソフトウェアを使用することで、A89307KETSR-Jを使用したFOCベースのBLDCモータドライブの開発を迅速に進めることができます(図5)。このボードには、すべての入出力ピンにアクセスできるA89307KETSR-Jに加えて、BLDCモータを駆動するための完全な3相パワー段が含まれています。設計者は、シンプルなグラフィカルユーザーインターフェース(GUI)を用いてFOCドライブのパラメータを選択し、それをオンチップEEPROMにロードすることができます。A89307KETSR-Jが必要とするBOMが最小限となるため、モータハウジング内に収まるドライブを設計することが可能になり、ソリューションのサイズをさらに小さくできます。
 図5:APEK89307KET-01-T-DK評価ボードには、A89307KETSR-J(U1、ボードの中央左側)と6個のパワーMOSFET(右側)が搭載されており、BLDCモータを駆動します。(画像提供:Allegro MicroSystems)
図5:APEK89307KET-01-T-DK評価ボードには、A89307KETSR-J(U1、ボードの中央左側)と6個のパワーMOSFET(右側)が搭載されており、BLDCモータを駆動します。(画像提供:Allegro MicroSystems)
ADAS用センサ
xEVシステムの設計者は、小型で費用対効果の高いADAS機能を実現するために、モータドライブ、DC/DCコンバータ、インバータの電流レベル、スロットルバルブやシリンダの回転位置、トランスミッションのギアの回転数や方向などを検知する必要があります。Allegro MicroSystemsは、ADAS向けに以下のようなさまざまなセンサソリューションを提供しています。
電流センシング: ACS72981KLRATR-150B3は、経済的で精密なAC/DC電流センシングを実現します。本製品は、モータ制御、DC/DCコンバータ制御、インバータ制御、負荷検出・管理などの用途向けに設計された、250kHzの帯域幅を持つ高精度リニアホール効果電流センサです。このICはAEC-Q100に準拠しており、応答時間は2µs未満で、セーフティクリティカルなアプリケーションに必要な迅速な過電流障害検出をサポートします。
3次元位置センシング:スロットル、バルブ、シリンダ、トランスミッションの位置を検出する非接触型のリニアおよびロータリ3次元磁気位置センシングは、Allegro MicroSystemsの3DMAG ICであるA31315LOLATR-XY-SE-10を使用して迅速に実装することができます。このデバイスは、水平・垂直方向の回転運動と、前後・左右方向の直線運動の測定が可能です(図6)。
 図6:3次元位置センサA31315LOLATR-XY-SE-10は、水平方向と垂直方向での回転運動の測定と、横方向と前後方向の直線運動の測定が可能です。(画像提供:Allegro MicroSystems)
図6:3次元位置センサA31315LOLATR-XY-SE-10は、水平方向と垂直方向での回転運動の測定と、横方向と前後方向の直線運動の測定が可能です。(画像提供:Allegro MicroSystems)
A31315LOLATR-XY-S-SE-10センサでは、レシオメトリックアナログ、PWM、SAE J2716シングルエッジニブル伝送(SENT)のいずれかの出力形式を選択することができます。本製品は、安全関連の自動車システム向けに、ISO 26262 ASIL B(シングルダイ、SOIC-8パッケージ)およびASIL D(冗長性を備えたデュアルダイ、TSSOP-14パッケージ)に準拠して開発されています。
回転数と方向: ATS19520LSNBTN-RSWHPYUは、耐振動性に優れた、トランスミッションの回転数と方向向けの差動式ホール効果ギアトゥースセンサで、正逆方向の検出が可能なモデルが用意されています(図7)。
 図7:ATS19520の「F」バージョンは、ギアの歯がピン1からピン3まで通過すると正回転(上)、ピン3からピン1まで通過すると逆回転(下)を測定します。「R」バージョンは、逆方向の回転を測定します。(画像提供:Allegro MicroSystems)
図7:ATS19520の「F」バージョンは、ギアの歯がピン1からピン3まで通過すると正回転(上)、ピン3からピン1まで通過すると逆回転(下)を測定します。「R」バージョンは、逆方向の回転を測定します。(画像提供:Allegro MicroSystems)
ISO 26262 ASIL B認証済のこのセンサは、診断機能を内蔵しており、xEVのドライブトレインでの使用に適しています。3ピンのシングルインラインパッケージ(SIP)には、回転する鉄製ターゲットの速度と方向を測定するためのバックバイアスマグネットと、電磁両立性を確保するためのコンデンサが内蔵されています。
まとめ
電流センサ、磁気位置センサ、回転センサを統合したセンサレスFOC BLDCモータドライブは、航続距離が長く二酸化炭素排出量の少ない、効率的で安全なxEVの設計を可能にする重要なコンポーネントです。特にFOCモータドライブを使用することで、バッテリパックやトラクションインバータの動的応答性を向上させ、より効率的で静かな冷却システムを設計することができます。先進運転支援システムの信頼性要件やISO 26262の機能安全要件を満たすxEVの開発には、小型で高精度、かつエネルギー効率の高いセンサが不可欠です。
お勧めの記事
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、DigiKeyの意見、信念および視点またはDigiKeyの公式な方針を必ずしも反映するものではありません。