中小企業が産業用メタバースを活用してロボットソリューションを迅速に検討および導入する方法
DigiKeyの北米担当編集者の提供
2024-11-21
ロボットと協働ロボット(コボット)は、ファクトリオートメーションにおける最先端の技術です。デジタルツインとバーチャルリアリティ(VR)は、設計と開発ツールの最先端の技術です。これらを組み合わせることで、中小企業であっても、より高い生産性をより迅速に実現する産業用メタバースを構築することができます。
中小企業の設計者は、デルタ型、リニア型、多軸型ロボットなどの物理的なオブジェクトの非常に詳細な仮想モデルであるデジタルツインと、ロボットの動作シーケンスを直接実行および確認できる3次元(3D)VR環境を組み合わせた、シンプルで直感的なインターフェースを活用することができます。
これらの機能を使用することで、実際のハードウェアがなくても、オートメーションシステムの微調整や最適化が可能になり、複数のソリューションの可能性を迅速に検討することができます。
本記事ではまず、数学的なデータ記述によるデジタルツインと視覚的なデジタルツイン(VRツイン)の違いを説明し、その両方が産業用メタバースの構築するためにどのように必要かを解説します。そして、物理的なハードウェアを一切使用せずに、3Dインターフェース(ビジュアルデジタルツイン)上でロボットのシミュレーションを行うことができるIgusのロボット制御システムと関連ソフトウェアを、最適化されたソリューションを実現するために使用できる互換性のあるデルタ型、リニア型、多軸型ロボットとともに紹介します。
デジタルツインとVRは、異なる視覚化形態、インタラクション、ハードウェアを使用する補完的な技術です。デジタルツインは、物理的なオブジェクト、システム、またはプロセスのデータに基づくモデルです。これは、最初の概念から廃棄、リサイクルに至るまで、モデル化されるアイテムのライフサイクル全体を通じて使用されるように設計されています。
VRは没入型の視覚ベースの技術で、デジタルモデルも使用します。VR環境では、ロボットがタスクを実行するように、オブジェクト間の関係やインタラクションをシミュレーションすることが可能です。つまり、どちらの技術も設計やシミュレーションに使用できますが、デジタルツイン技術はライフサイクル全般を考慮することに重点を置き、VRは物理的オブジェクト間のインタラクションに重点を置いています。
メタバースは、デジタルツインとVRを組み合わせて、デジタルオブジェクトと人々の間のリアルタイムのインタラクションをサポートする専用の仮想環境を構築します。ゲームに関連することが多いですが、ビジネスや産業分野に応用されることも増えています。
イグバースへようこそ
Igusは、ロボットシステムの開発や導入など、産業環境におけるエンジニアリングインタラクションをサポートするメタバース「イグバース」を開発しました。イグバースは、Igusロボット制御(iRC)ソフトウェアで実装できます。ライセンスフリーの無料アプリケーションで、デルタロボット、コボット(ロボットアーム)、ガントリロボットなど、さまざまなタイプのロボットを制御できます。
3Dインターフェースと100以上のサンプルプログラムを提供しています。iRCを導入するためのシステム要件には、Windows 10または11(64ビット)を搭載したPC(最低でもIntel i5 CPU)、500MBのディスク空き容量、Ethernetまたはワイヤレスネットワーク接続が含まれます。
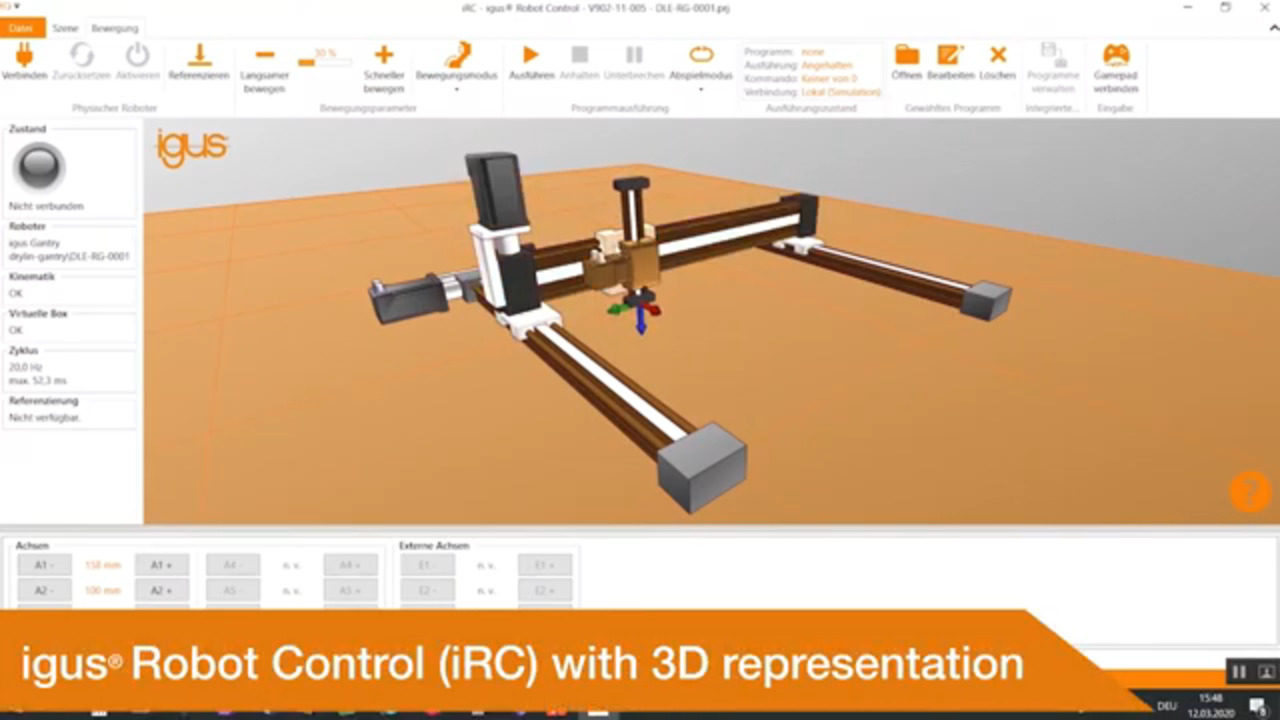
このソフトウェアの核となるのは、プログラムされているロボットの3Dデジタルツインです。たとえば、DLE-RG-0001-AC-500-500-100のようなワークスペース500×500×100mmの3軸リニアガントリロボットや、DLE-LG-0012-AC-800-500のようなワークスペース800×500mmの2軸xyアクチュエータです(図1)。設計者は、ロボットを購入する前でも、マウスを数回クリックするだけで動きを定義し、3Dモデルを使って必要な動きが実現可能かどうかを確認することができます。
 図1:イグバースの3軸ガントリロボットの3D VRデジタルツインの例。(画像提供:Igus)
図1:イグバースの3軸ガントリロボットの3D VRデジタルツインの例。(画像提供:Igus)
iRCソフトウェアに加えて、ロボットコントローラはイグバース開発環境の重要な要素です。たとえば、モデルIRC-LG12-02000は48Vモータ用で、7つの入力と7つの出力があり、ロボットに接続するための10mのケーブルがあります。iRCコントローラには、さまざまなサイズのバイポーラステッピングモータ用のモータドライブモジュールが含まれており、構成可能または構成済みで入手できます。また、システム統合のためのインターフェースは、以下の通りです。
- デジタル入出力による制御のためのプログラマブルロジックコントローラ(PLC)インターフェース。特にPLCまたは押ボタンによる、プログラムの容易な開始と停止
- PLCまたはPCによる制御用Modbus TCPインターフェース
- PLCまたはPCを使用した制御および設定のためのCRI(Common Robotic Interface)Ethernetインターフェース
- ROSを使用してロボットを操作するためのロボットオペレーティングシステム(ROS)インターフェース
- 物体検出カメラ用インターフェース
- ロボットの状態を遠隔監視するクラウドインターフェース
サポートされたキネマティクス
ロボットの制御された動きを定義するさまざまなキネマティクス(基本動作)がイグバースでサポートされています。あらかじめ設定されたキネマティクスに加えて、さらに最大3つのキネマティクスに独立した軸をiRCで設定することができます。事前に設定されたキネマティクスは以下の通りです。
- 2軸および3軸デルタロボット
- ガントリロボット、
- 2軸(X軸およびY軸)
- 2軸(Y軸およびZ軸)
- 3軸(X軸、Y軸、Z軸)
- ロボットアーム(コボット)、
- 3軸(軸1、2、3)
- 3軸(軸2、3、4)
- 4軸(軸1、2、3、4)
- 4軸(軸2、3、4、5)
- 5軸(軸1~5)
- 6軸(軸1~6)
- 4軸スカラロボット
低コスト自動化のための簡単なプログラミング
IgusのロボットとiRCは、低コストの自動化をサポートするように設計されています。それは、使いやすいプログラミングインターフェースなしには不可能です。3ボタン式マウスやゲームパッドで、イグバースのロボットを動かしたり、位置を決めたりできます。iRCソフトウェアを使えば、ユーザーは3Dインターフェース上でデジタルツインのすべての軸を自由に動かすことができます。ティーチイン機能により、物理的なロボットが接続されていなくても、ロボット制御ソフトウェアの開発が可能です。
ティーチインを実施するには、ユーザーが手動でバーチャルロボットを必要な位置に移動させ、そこでの移動方法を定義します。このプロセスは、完全なモーションプロファイルが作成されるまで繰り返されます。iRCソフトウェアのツールセンターは、グリッパのようなエンドエフェクタを簡単に追加でき、ロボット上のツールの中心点を自動的に調整します。さらに、上位の産業用制御システムへの接続を追加することもできます。
このプロセスは、インターフェースの必要に応じて「接続」、「リセット」、「有効化」ボタンを使ってロボットを起動させることから始まります。iRCのステータス表示LEDが緑色に点灯し、「No Error」のステータスが表示されるはずです。これで、「Jogging」タブを使ってモーションプロファイルを入力できるようになりました(図2)。
 in the iguverse immersive development environment (click to enlarge)") 図2:イグバース没入型開発環境の「Jogging」タブ(左下)を使ってモーションプロファイルを入力できます。(画像提供:Igus)
図2:イグバース没入型開発環境の「Jogging」タブ(左下)を使ってモーションプロファイルを入力できます。(画像提供:Igus)
ガントリロボット
イグバースの先行例に含まれるようなガントリロボットは、2つの基本X軸、Y軸、およびオプションのZ軸で構成されます。Y軸は2本の平行なX軸に取り付けられ、2次元空間を往復します。オプションのZ軸は3次元の動きをサポートします。
Igusのガントリロボットは、自己潤滑性プラスチックライナーを採用しており、従来のボールベアリングベースの設計よりも滑らかで静かなスライドとロールを実現します。新しい設計は、軽量、耐腐食性、メンテナンス不要であり、これらは中小企業にとって重要な品質です。また、中小企業にとって極めて重要なのは、これらのロボットは従来のガントリロボットよりもコストが最大40%低く、投資利益率(ROI)が早いことです。
これらのロボットは、低速で高負荷の場合と、高速で低負荷の場合の2つのアプリケーションに適しています。代表的なアプリケーションには、包装、ピックアンドプレース、ラベリング、マテリアルハンドリング、組立作業などがあります。
これには、さまざまなサイズが用意されています。利用可能な付属品には、カップリング、エンドエフェクタ、モータフランジなどがあります。中型ガントリロボットの例としては、以下のようなものがあります。
- DLE-FG-0006-AC-650-650は、650×650mmのワークスペースを持つ2次元フラットガントリです。このロボットは最大8kgまでのペイロードを扱うことができ、最大で毎分20回のピッキングを行うことができます。
- DLE-RG-0012-AC-800-800-500は、800×800×500mmのワークスペースを持つ3次元ガントリです。これは最大10kgまでのペイロードを扱うことができ、最大で毎分20回のピックのピッキングを行うことができます。
パレタイジング能力
出荷する製品をパレタイズすることは、製造業やロジスティクス業務では日常的な作業です。イグバースの最新かつ最大のロボットは、作業スペース2,000 x 2,000 x 1,500mmのXXL大型ガントリロボットで、最大10kgまでのパレタイジングアプリケーションに適しています。最大6,000×6,000×1,500mmの作業スペースを持つカスタム設計も可能です。
これらのガントリロボットは、最大10kgの部品をピッキングし、最大500mm/sの速度で搬送し、0.8mmの繰り返し精度でパレットに載せることができます(図3)。Igusのパレタイジングロボットソリューションは、同等のシステムと比較して最大60%コスト削減が可能です。
 図3:パレタイジングは、製造業や物流業務において一般的かつ重要な作業であり、ガントリロボットを使用して自動化することができます。(画像提供:Igus)
図3:パレタイジングは、製造業や物流業務において一般的かつ重要な作業であり、ガントリロボットを使用して自動化することができます。(画像提供:Igus)
デルタロボット
ガントリロボットと同様、デルタロボットにも2軸と3軸があります。デルタロボットは、作業スペースの上にドーム型のワークエンベロープが取り付けられています。これは非常に高速で、マテリアルハンドリングや部品配置によく使用されます。Igusのデルタロボットの例には以下のようなものがあります。
- RBTX-IGUS-0047は3軸設計で、ワークスペースの直径660mmです。精度は±0.5mm、最大ペイロードは5kg、最高速度は0.7m/sで、1分間に最大30回のピッキングが可能です。(図4)。
- RBTX-IGUS-0059は2軸設計で、ワークスペースの直径は700mmです。これも精度は±0.5mmです。最大ペイロードは5kg、最大速度は2m/sで、1分間に最大50回のピッキングが可能です。
 図4:Igus iRC(左)の隣に置かれた3軸デルタロボットの例。(画像提供:DigiKey)
図4:Igus iRC(左)の隣に置かれた3軸デルタロボットの例。(画像提供:DigiKey)
多関節アームコボット
イグバースは多関節アームのコボットにも対応しています。コボットは2軸から10軸以上の自由度(DOF)を持つことができます。一般的に、作業範囲が広く、人と協力して複雑な作業を行うことができます。IgusのモデルREBEL-6DOF-02は6自由度、モデルREBEL-4DOF-02は4自由度です。どちらも精度は±1mm、公称作業範囲は400mmで、200 mm/sの直線速度で最低でも毎分7回のピッキングが可能です。
6自由度モデルの最大ペイロードは2kg、最大リーチは664mmです。4自由度モデルの最大ペイロードは3kg、最大リーチは495mmです(図5)。
 and 6 DOF (right)") 図5:4自由度(左)と6自由度(右)の多関節アームコボット。(画像提供:Igus)
図5:4自由度(左)と6自由度(右)の多関節アームコボット。(画像提供:Igus)
まとめ
イグバースの没入型産業メタバースは、デジタルツインとVRを組み合わせ、ロボットソリューションの迅速な開発と導入を可能にするツールを提供します。無料、ライセンスフリーで、クラウドに接続せずにPC上でローカルに動作するように設計されています。ロボットがその場になくても、ロボットソリューションの開発やテストに使用することができます。
デルタロボット、ガントリロボット、ロボットアーム(コボット)、スカラロボットの幅広いキネマティクスをサポートしています。iRCには、PLCインターフェース、Modbus TCP/IP、CRI Ethernet、ROSインターフェース、物体検知カメラ用インターフェース、クラウドインターフェースなど、自動化と運用のニーズをサポートするさまざまなインターフェースが用意されています。Igusのイグバース、iRC、および関連ロボットは、中小企業の低コスト自動化ニーズをサポートするために最適化されています。
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、DigiKeyの意見、信念および視点またはDigiKeyの公式な方針を必ずしも反映するものではありません。