小型軽量化と高出力化を実現した堅牢な産業用ミニチュアコネクタ
DigiKeyの北米担当編集者の提供
2021-05-25
設計者は、サイズ、重量、および電力とコスト(SWaP-C)の最適化の一環として、ますます不便で狭くなるスペースに、より多くの機能を押し込むことを求められています。これは特に、ポータブルデバイス、産業用ロボットシステム、航空システムなど、相互接続における電力信号の配線とデータ信号の配線が近接している場合に当てはまります。
設計者は、信頼性と信号の完全性に配慮する一方で、様々なピン配列やユースケースに合わせて相互接続システムを簡単に構成でき、セットアップ時には確実に接続・切断できて、かつ使用中にはメンテナンスが容易になるように考慮する必要があります。
この記事では、電子機器システムの設計者が、小型でタイトな相互接続の状況に適したコネクタファミリを使用することで、安定した接続を確立する方法について説明します。Harwinの1つの相互接続ファミリを標準とすることで、幅広い相互接続の課題に対してSWaP-Cの最適化を実現するための方法を説明します。小規模システムの相互接続を目的とした2つのサンプルソリューションの適用について説明します。
小規模システムにSWaP-Cが必要な理由
ポータブルデバイスや通信機器などの電子機器システムの設計者には、より多くの機能をより小さなスペースに収めることが求められています。このため、システム規模を縮小するためには、既存の部品に必要なフットプリントを減らすことで、同じ面積の中により多くの部品を搭載できるようにしなければなりません。また、相互接続システムは、硬い床に落としても割れたり破損したりしない堅牢性も求められます。激しい落下により、コネクタに断続的な接続問題が発生する可能性があります。この可能性を診断しない場合は、デバイスが廃棄される恐れがあるので、ユーザーにとってもメーカーの評判にとっても高くつく結果となります。
SWaP-Cの最適化が望まれるもう一つの例は、産業用ロボットシステムです。重量のあるロボットシステムが、数個のコネクタのサイズを小さくしたところで大きな利益を得られるとは思えないかもしれませんが、実際のSWaP-Cの利益は、1箇所の最適化によってではなく、数百のサブシステムを組み合わせて最適化することで得られます。ロボットの軽量化・小型化は、効率化につながるので、アームや絞りを動かすために必要な電力が減り、ひいてはコストが削減されます。また、ロボットアームは激しい起動や停止を繰り返すことが多いため、時間の経過とともに相互接続システムにストレスがかかり、断続的な故障につながります。さらに、ロボットシステムでは電源信号とデジタル信号の両方を同じワイヤハーネスで伝送する必要があるため、これら2種類の信号を同じコネクタで安定的に、かつ干渉なく伝送しなければならないという相互接続上の課題があります。
航空システムはSWaP-Cが必要とされることが明らかな分野であり、相互接続システムがより軽量・小型で、より多くの電力を伝送できれば、より効率的な、軽量の航空機を製造できます。また、航空システムでは定期的に検査が行われ、コネクタの嵌合/抜去が頻繁に行われます。相互接続システムは、大きな嵌合/抜去回数に耐えることができる必要があるだけでなく、多数のコネクタが同じエリアにある場合に誤った嵌合イベントを防ぐための多様なキーイングオプションを備えている必要もあります。
SWaP-Cの最適化はドローンの設計に特に有利です。1オンス(約28グラム)軽量化できるごとに、バッテリ寿命や飛行時間が顕著に改善されるからです。また、ドローンではサイズが重要です。ドローンが小さいほど、重心のバランスを保つために必要な電力が少なくて済むからです。
スマート家電も、SWaP-Cの最適化が必要な分野です。狭いキッチンスペースに設置する家電としては、小さくて軽い方が常に有利です。食器洗い機、洗濯機、衣類乾燥機などの家電では、時間の経過とともに、振動によって誤った相互接続システムが切断される可能性が出てくるため、頑丈な相互接続システムが必要となります。また、メンテナンスを容易にするために、コネクタの嵌合/抜去が簡単で面倒臭くないことが必要です。
このような様々なアプリケーションの要件により、様々な革新的な相互接続システムの設計手法が生まれましたが、それらの設計手法の多くを1つの相互接続システムの製品ラインナップに適用するだけで、最適な性能、信頼性、および使いやすさを実現することができます。
SWaP-C最適化のためのネジロック式相互接続
たとえば、コネクタが使いやすいものであるには、機器を素早く組み立てるための嵌合のしやすさ、メンテナンスを容易にするための抜去のしやすさ、それでいて衝撃や振動に耐え得る強度と、ケーブルアセンブリ内の低電流ワイヤにストレスを与えないような十分な軽量さが必要です。SWaP-C相互接続の最適化では、どのような状況でもしっかりした相互接続が必要となるため、HarwinではGecko SL 1.25ミリ(mm)ピッチのネジロック式相互接続システムを用意しています。この相互接続システムとは、同等の用途で使用されている一般的なMicro Dコネクタと比較して、最大45%の小型化、最大75%の軽量化を実現した高信頼性のコネクタのことです。
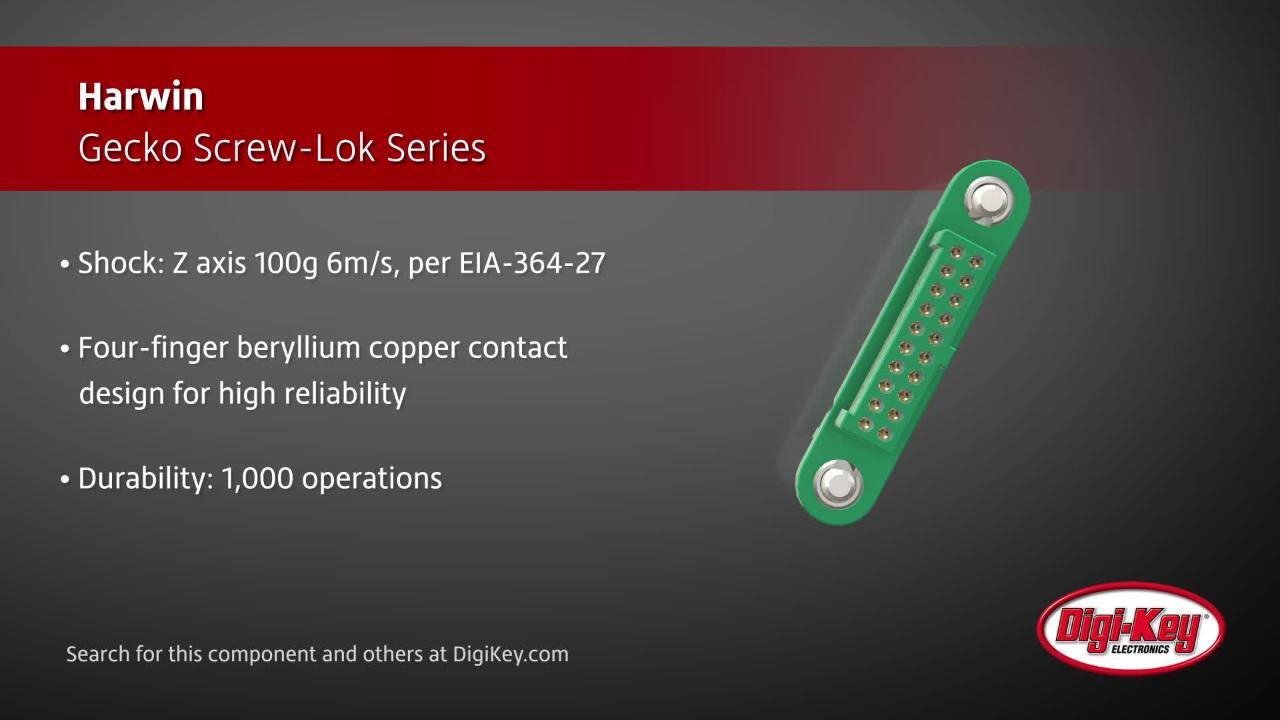
Gecko SLコネクタの嵌合ペアの例としては、Harwin G125-2241096F110極レセプタクルとHarwin G125-3241096M210極パネルマウントプラグがあります(図1)。右のプラグハウジングは、上面と下面に凹みとキーがあります。これにより、機器の故障の原因となるレセプタクルの誤挿入を防ぐことができます。システム内の複数のコネクタが近接して配置されている場合の誤挿入を防ぐために、様々なキー設定のGecko-SLコネクタを用意しています。
 図1:Harwin G125-2241096F1 10極レセプタクルハウジング(左)をHarwin G125-3241096M2 10極パネルマウントプラグハウジング(右)と嵌合する。接触面の上下にはキーが設けられており、接合マークによりコネクタの嵌合が容易になっています。(画像提供:Harwin)
図1:Harwin G125-2241096F1 10極レセプタクルハウジング(左)をHarwin G125-3241096M2 10極パネルマウントプラグハウジング(右)と嵌合する。接触面の上下にはキーが設けられており、接合マークによりコネクタの嵌合が容易になっています。(画像提供:Harwin)
Gecko SL相互接続システムは、圧着コンタクトを使用します。また、コネクタを固定するための、2つのネジロックを備えています。これは、振動や大きな衝撃を受けるシステムで、コネクタが強制的に抜き去られることがある場合に利点があります。ステンレス製のネジロックは、どのような状況でもしっかりした接続を可能にします。本コネクタシステムでは、2本のネジで固定する前にしっかりと電気的に接続する「MATE-BEFOR-LOCK」機構が使用されています。これにより、技術者がメンテナンスやテストの際、一時的にコネクタを嵌合することができます。また、この相互接続システムは水平軸に関して対称となっていて、各コネクタの上面には三角形の接合マークが付けられているので、技術者が簡単に嵌合できるようになっています。このコネクタは、1000回の嵌合/抜去が可能なため、定期的な検査やメンテナンスの際にコネクタを抜き去る必要がある航空宇宙アプリケーションに適しています。
10個のピン位置はそれぞれ単独で最大2.8アンペア(A)を処理することが可能です。すべてのコンタクトが電流を流すために同時に使用される場合、各コンタクトは最大2.0Aを処理することができます。5つの電源コンタクトと5つのグランドコンタクトにより、各コンタクトの最大電力伝送能力は10.0Aになります。
本コネクタシステムは、嵌合すると、高い耐摩耗性を持ち、6ミリ秒(ms)にわたる100gの衝撃と6時間にわたる20gの振動に耐えることができるので、過酷なロボットシステムや産業用システムに適しています。ハウジングは材質がガラス充填サーモプラスチックで、温度範囲-65℃~+150℃で動作します。そのため、本コネクタは、砂漠の滑走路の暑さから高地の極寒までの激しい温度差のある航空システムに適しています。また、高周波の振動を受ける可能性のあるシステムでは、圧着アセンブリにバックポッティング化合物を塗布して、さらに補強することをお勧めします。
SWaP-C最適化のための信号と電力の相互接続
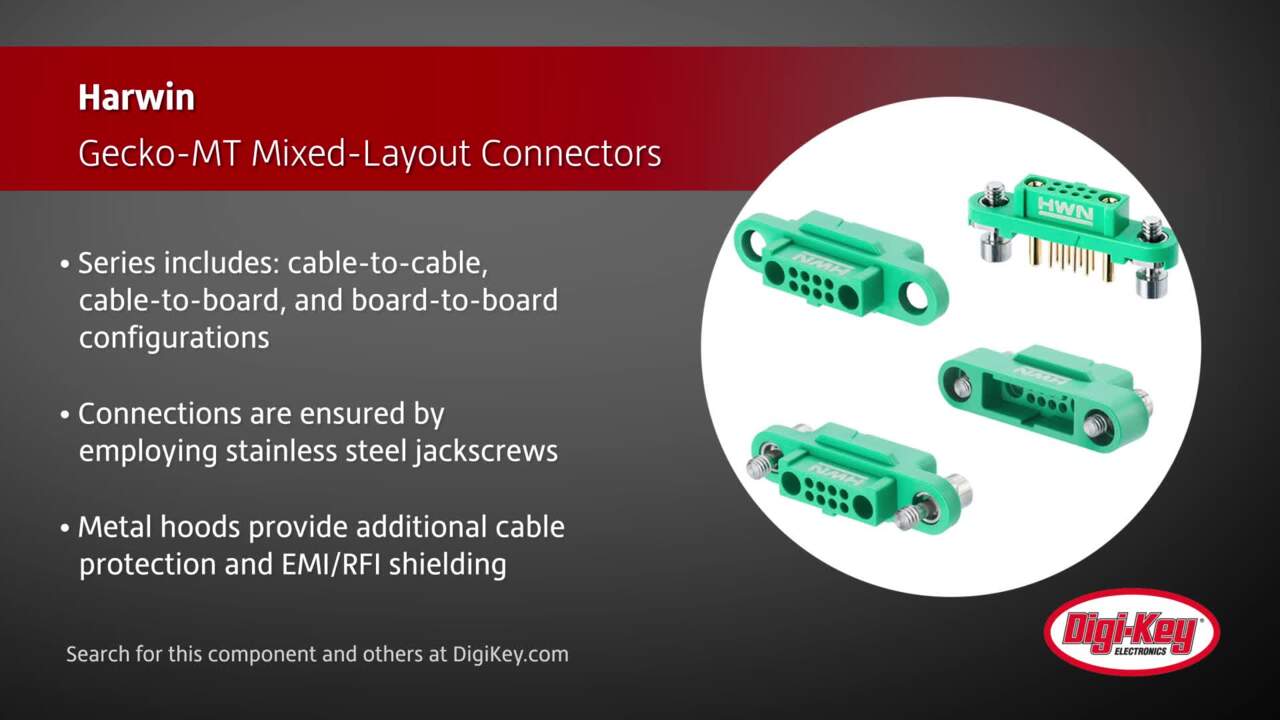
場合によっては、相互接続システムは、大電流の制御信号と、さらにそれよりもはるかに大きな電流の電源接続の両方を、同じワイヤハーネスで処理する必要もあります。このような相互接続アプリケーションでは、必要となる両方のサイズのコンタクトに対応できる混合レイアウトの接続システムが必要になります。このようなシステムとして、Harwinでは1.25mmピッチの混合レイアウトの相互接続システムGecko-MTを用意しています。この相互接続システムは、制御信号と電源信号が混在していても問題なく伝送できるように設計された、非常に小型で軽量なコネクタです。このような用途向けとしては、8つの信号接続と4つの電力接続を備えたHarwin G125-FV10805F3-2AB2ABPレセプタクルと、それに対応したG125-32496M3-02-08-02プラグを使用することができます(図2)。
 図2:Harwin Gecko-MT G125-FV10805F3-2AB2ABPレセプタクル(左)とGecko-MT G125-32496M3-02-08-02プラグ(右)は、電源端子あたり10A、信号端子あたり2Aの容量を持つ8信号、4電源の相互接続システムを構成します。(画像提供:Harwin)
図2:Harwin Gecko-MT G125-FV10805F3-2AB2ABPレセプタクル(左)とGecko-MT G125-32496M3-02-08-02プラグ(右)は、電源端子あたり10A、信号端子あたり2Aの容量を持つ8信号、4電源の相互接続システムを構成します。(画像提供:Harwin)
この相互接続システムにおける8つの信号端子はそれぞれ最大2Aを処理できるのに対し、信号端子よりも大きい4つの電源端子は、1つの端子につき最大10Aを処理することができます。これにより、航空宇宙システムでよく見られる狭いスペースにある航空電子機器の制御盤などでも、柔軟に相互接続を行うことができます。また、ロボットシステムの多くは制御信号と電力の混合を、ロボットアームやその他の機械的に制御された機構に沿って伝送する必要があるので、このような用途にはこのタイプの相互接続が最適です。
Harwin Gecko-MTは、Gecko-SLと同様に、誤挿入を防止するためのキーを備えています。このコネクタには、図2に示すように、下側に狭いキーノッチ、上側に非常に広いキーノッチがあります。Gecko-MTコネクタには、コネクタを正しく挿入するための様々なキー構成と、技術者が簡単に挿入を行えるようにするための三角形の接合マークがあります。図2の左側のレセプタクルは、スルーホール端子でプリント基板に取り付けられています。レセプタクルは、下側の2本のボルト/ナットでプリント基板に固定されているので、しっかり取り付けられています。これにより、高振動環境下でコネクタがねじれたり基板から引き抜かれたりしないようにすることができます。プラグはレセプタクルに挿入され、ステンレス製のレセプタクルネジソケットにねじ込まれます。
また、Gecko-MTの相互接続システムは、MATE-BEFORE-LOCKシステムを採用することで、手堅い電気接続を実現するとともにメンテナンス時のテストを円滑にしています。この相互接続システムは、メンテナンスや再構成時の接続が非常に安定するように、1000回の嵌合/抜去サイクルを定格としています。
嵌合したGecko-MTコネクタシステムは、6msにわたる100gの衝撃と6時間にわたる20gの振動に耐えることができるため、省スペースのために信号と電力を一緒に伝送する必要があるロボットや産業用アプリケーションに適しています。ガラス充填サーモプラスチックは、温度範囲-65℃~+150℃で動作できるため、極端な温度変化を伴う航空アプリケーションで使用することができます。
まとめ
多くの電子機器システムの設計者は、効率性の向上、コストの削減、動作性能の改善のために、新規および既存のシステムをSWaP-Cの点で最適化する必要があります。SWaP-Cを最適化するには、最適の相互接続システムを選定する必要があります。さらに、ポータブルデバイス、産業用ロボットシステム、航空システム、スマート家電などのシステム設計者は、接続部がアプリケーションの過酷な振動に耐えるとともに、狭い空間で大電流を流すことができるかどうかを確認する必要があります。設計者は、システムの信頼性を実現するとともにコネクタを使いやすくするために、1つの相互接続システムを標準とすることで、設計プロセスを簡素化することができます。
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、DigiKeyの意見、信念および視点またはDigiKeyの公式な方針を必ずしも反映するものではありません。