高度な触覚フィードバックをポータブルタッチスクリーン設計にもたらす新しい圧電アクチュエータ
DigiKeyの北米担当編集者の提供
2020-02-13
タッチスクリーンのユーザーインターフェースは、機械式インターフェースよりも明らかに優れることから、その用途が広がっています。民生用機器では滑らかで直感的なインターフェースが可能になり、産業用機器ではディスプレイに隙間がないので汚れや湿気が侵入する問題を避けられます。しかしどちらの用途にも弱点があります。たとえば民生用機器では、機械式スイッチならではのクリックの感触による安心や満足がなくなり、産業用機器では手袋を着けてタッチスクリーンを操作するとボタンを押した感覚がわかりにくくなります。
タッチスクリーンの反応の分かりにくさを解決するために、振動でボタンの操作感を再現する触覚フィードバックが使用されています。しかし既存のソリューションでは、複雑でかさばる機械式システムを使う傾向があります。それらのシステムには、偏心回転質量(ERM)振動モータやリニア共振アクチュエータ(LRA)などが含まれます。それに代わる圧電触覚フィードバックは、より小型で柔軟なソリューションです。しかし最近まで、その高い動作電圧によって、低消費電力のアプリケーション(電池駆動製品では欠かせない要件)では採用が困難でした。
しかし、「高分解能」の圧電触覚ソリューションが進化しており、消費電力の問題に対応するだけでなく、コンパクトな薄型フォームファクタ、より強い力のフィードバック、高速応答時間など、新たな利点も触覚インターフェース設計にもたらしています。
この記事では、ERMおよびLRAよりも新しい圧電触覚アクチュエータの利点について概説し、次に多層構造とバイポーラ駆動モードに基づく新世代のデバイスを紹介します。これらは効率的な専用ドライバと併用することで、前述の電力消費の問題に対応します。さらに記事では、エンジニアが今後のタッチスクリーン式触覚フィードバック製品でこれらのアクチュエータとドライバを活用する方法を、TDKの触覚製品とBoréas TechnologiesおよびTexas Instruments(TI)のドライバの使用例を紹介しながら説明します。
触覚フィードバックの選択肢
触覚フィードバックをタッチスクリーンインターフェースに追加する方針の設計者には3つの選択肢、すなわちERM、LRA、圧電アクチュエータがあります。これら3つはいずれも同じ基本原理によって機能し、マイクロコントローラが動作を監視し、ドライバがアクチュエータを制御して振動を発生させます(図1)。それらの違いは、振動がどのように起きるかにあります。ERMでは中心がずれた回転おもりを使用し、LRAではコイルスプリングで吊り下げられた磁気おもりを使用します。圧電デバイスが利用するのは(逆)圧電効果で、これは電界にさらされた水晶振動子またはセラミック体の寸法に変化をもたらします。
 図1:触覚タッチスクリーンシステムは、マイクロコントローラ、ドライバ、アクチュエータで構成されます。この例のアクチュエータは圧電デバイスですが、ERMとLRAはよく使われる別の選択肢です。(画像提供:Boréas Technologies)
図1:触覚タッチスクリーンシステムは、マイクロコントローラ、ドライバ、アクチュエータで構成されます。この例のアクチュエータは圧電デバイスですが、ERMとLRAはよく使われる別の選択肢です。(画像提供:Boréas Technologies)
ERMとLRAはポータブル製品の設計によく使われている実績がありますが、その理由は主に、これらに低電圧(約3ボルト)のオプションがあり、シンプルなドライバ設計で済むからです。対照的に、従来の圧電デバイスには各段に高い電圧(最大200ボルト)が必要です。これは民生機器から優れた使用感を得られるように、十分な機械的変形を生むためです。このような高電圧が必要な理由は、従来の圧電触覚ドライバ技術は一般的にオーディオアンプをスケールダウンした技術に基づいており、低消費電力を念頭にゼロから設計されていないことにあります。さらに、専用の低電力触覚アクチュエータドライバがなかったことがもう1つの設計課題でした。設計者はそれほど効率的でないソリューションに頼らざるを得なかったのです。
一方で、圧電ソリューションの主な利点は、高分解能の触覚をサポートして、フィードバックを単なる単調な振動以上のものに強化することにあります。たとえば、圧電アクチュエータが生成できる振動は、周波数と振幅がさまざまで、ボタン1個を押したときの反応をさまざまに変えることができます(図2)。
") 図2:圧電触覚アクチュエータでは幅広い振動が可能で、これを使いボタン1個の操作でさまざまな反応を引き出せます。(画像提供:Boréas Technologies)
図2:圧電触覚アクチュエータでは幅広い振動が可能で、これを使いボタン1個の操作でさまざまな反応を引き出せます。(画像提供:Boréas Technologies)
まとめると、高分解能の触覚フィードバックソリューションに必要なのは次の要素です。
- 広い帯域幅:広範な振動周波数とモードを有効にします
- 高加速度[g]:より強いフィードバック力を生みます
- 大きな変位:触覚フィードバックの感度を向上させます
- 低遅延:高速な応答時間でフィードバックの範囲を広げます
表1は、触覚フィードバックソリューションのそれぞれの性能をまとめたもので、圧電ソリューションが高分解能アプリケーションでは唯一の選択肢になることを示しています。なぜなら、帯域幅、フィードバックの力、感度、遅延の必要な組み合わせをもたらすからです。
|
表1:触覚フィードバックソリューションの動作特性の比較圧電デバイスは、高分解能の触覚フィードバックに求められる良好な加速度(単位「g」で測定され、1gは地球表面の重力による加速度(9.81m/s2))、変位、応答時間、カスタム波形を提供します。(画像提供:DigiKey、著者による)
留意点として、圧電アクチュエータでドライバの複雑さが増す一因は、触覚フィードバックに機能的な役割を与えるカスタム波形を生成するために付加機能が必要なことにあります。ERMとLRAはカスタム波形をサポートできないので、ドライバはよりシンプルです。
新しい圧電触覚フィードバックデバイスの利点
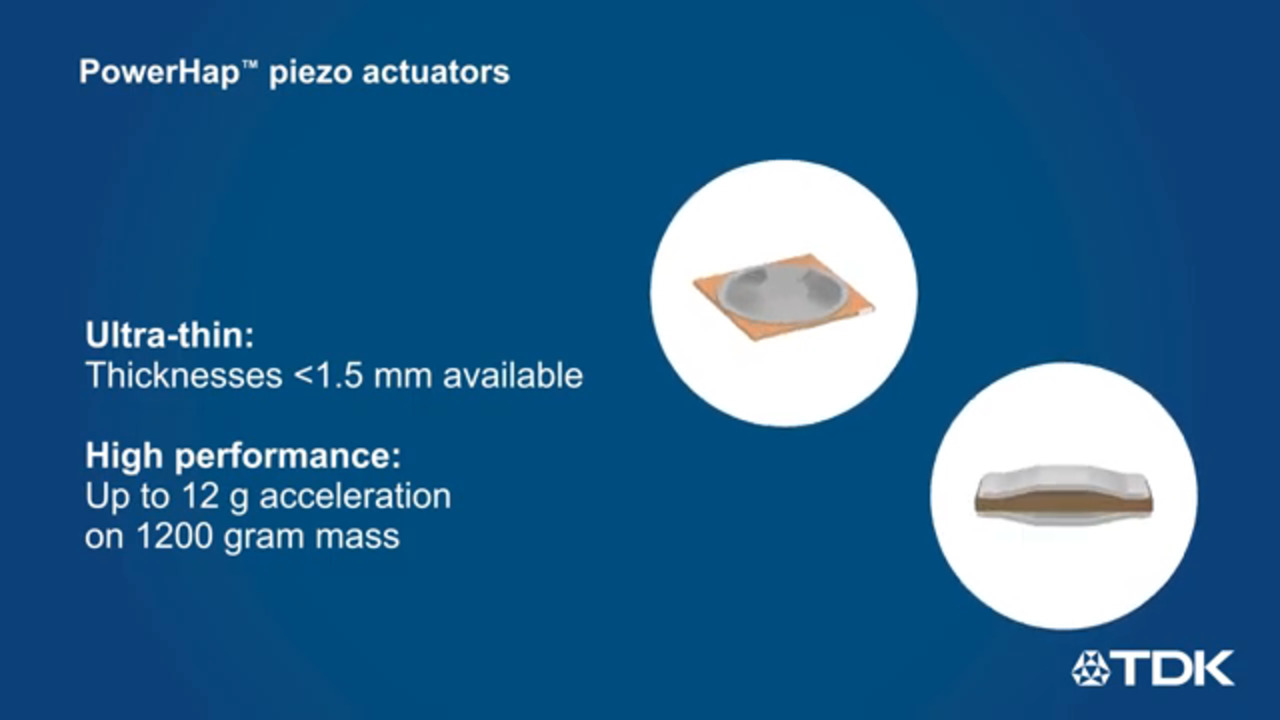
圧電アクチュエータと効率的な専用ドライバに向けて最近登場した各製品により、これらの技術が電池駆動式製品の非常に優れたソリューションとして進化しています。たとえば、最近発売されたTDKのPowerHap B54102H1020A001 (面積12.7平方ミリメートル(mm2))やB54101H1020A001(26mm2)などの圧電触覚製品は高さが2.5mm未満で、オーディオアンプ技術に基づくデバイスで使用されている単層ではなく多層構造を採用しています。この多層構造は、駆動電圧を(60~120Vの間に)下げることで、ドライバに対する要求をある程度緩和します。
TDKの多層型製品の各層は、逆圧電効果によって「z」方向に少しだけ拡張します。ただし、圧電デバイスは一定の体積を維持する必要があるので、各層は「x」および「y」方向に同時に収縮します。
TDK製品は、圧電デバイスの両端にある一対のシンバルを使用してこの収縮を機械的に増幅してz軸の動きを15倍に増やし、モデルに応じて35~65マイクロメートル(μm)の変位を実現します(図3)。100グラム(g)の負荷(ユニポーラ動作、単一パルス正弦波、200Hz)時に、大型のTDKアクチュエータは、わずか1ミリ秒(ms)後にピーク-ピークで30gの加速度を達成します。1~1000Hzの周波数範囲によって、設計者は高分解能の触覚フィードバックプロファイルをカスタム開発できます。
 図3:TDKの圧電触覚アクチュエータは、多層構造とシンバルを使用してz軸の動きを増幅します。(画像提供:TDK)
図3:TDKの圧電触覚アクチュエータは、多層構造とシンバルを使用してz軸の動きを増幅します。(画像提供:TDK)
TDKの圧電触覚アクチュエータは、ユニポーラモードまたはバイポーラモードで動作できます。ユニポーラ動作ではアクチュエータに正の電圧が印加され、バイポーラ動作ではピークの正と負の値の間で電圧が変化します。バイポーラ動作の利点は、同じピーク-ピーク電圧でより大きな変位を実現できること、またはより低いピーク-ピーク電圧で同じ変位を実現できることです。欠点としては、バイポーラ動作によってアクチュエータでの機械的および電気的負荷が増えます(図4)。
 offers the same mechanical displacement as unipolar") 図4:バイポーラ動作(右)は、ユニポーラと同じ機械的変位をもたらしますが、より低いピーク-ピーク電圧を使用します。(画像提供:TDK)
図4:バイポーラ動作(右)は、ユニポーラと同じ機械的変位をもたらしますが、より低いピーク-ピーク電圧を使用します。(画像提供:TDK)
最近ではシリコンベンダー各社も、触覚フィードバックアプリケーション専用設計のドライバチップを発表しています。これらの設計向上により、効果的な周波数範囲でさまざまな振動モードを生成し、以前の設計よりも各段に高効率で動作しながらユニポーラまたはバイポーラの駆動特性を提供できます。このような製品の例としては、Boréas TechnologiesのBOS1901CQT圧電触覚ドライバや、Texas InstrumentsのDRV2667モータパワードライバがあります。
Boréas TechnologiesのICは、シングルチップ圧電アクチュエータドライバでエネルギー回収技術を組み込んでおり、複数の振動信号を生成できます。このチップは、3~5.5Vの電源で最大190Vpk-pkのアクチュエータを駆動できます。BOS1901は高速シリアルペリフェラルインターフェース(SPI)を使用し、すべての設定をデジタルフロントエンドで調整できます。標準の起動時間は300マイクロ秒(μs)未満で、これは低レイテンシを意味します。
TIのチップは圧電触覚ドライバで、105V統合ブーストスイッチとデジタルフロントエンドを備え、高低両電圧のアクチュエータを駆動できます。デジタルフロントエンドにより、マイクロプロセッサからパルス幅変調(PWM)生成の負担やホストシステムでのさらなるアナログチャンネル要件の必要性を解消します。このチップには、波形の保存と呼び出しを行う専用メモリと、高度な波形シンセサイザが含まれています。標準の起動時間は2ミリ秒でレイテンシを抑制し、熱過負荷保護によりオーバードライブでのデバイスの損傷を防ぎます。
圧電触覚システムの設計
BoréasとTIのチップは両方とも、アプリケーションプロセッサ搭載済みのタッチ対応システムで動作するように設計されています。このプロセッサは、SPIにより触覚フィードバックの実行をトリガします。別の方法として、設計者はアナログ入力を使用して触覚効果をトリガできます(図5)。
 図5:TIのDRV2667モータパワードライバを含むアプリケーション回路。触覚イベントは、TIチップを搭載したタッチスクリーンアプリケーションプロセッサによってトリガされ、圧電触覚デバイスを駆動します。(画像提供:Texas Instruments)
図5:TIのDRV2667モータパワードライバを含むアプリケーション回路。触覚イベントは、TIチップを搭載したタッチスクリーンアプリケーションプロセッサによってトリガされ、圧電触覚デバイスを駆動します。(画像提供:Texas Instruments)
最新ドライバの統合レベルが一因となり、圧電触覚フィードバックを備えたタッチスクリーンシステムの設計は容易になっていますが、設計パフォーマンスを最適化するにはいくつかの部品の選択が重要になります。たとえば、ブースト電圧(BST)は、圧電アクチュエータにかかるピーク電圧より5ボルト高い必要があります。これにより、一定程度のアンプオーバーヘッドに対応できるようになります。また、この設定は図5に示す抵抗ディバイダネットワークR1/R2を使用して行います。
抵抗値を計算する式は、V(BST) = V(FB) x (1 + R1/R2)です。ここで、V(FB) = 1.32Vです。
これにより、たとえばTIドライバの最大V(BST)能力105Vを達成するには、R1とR2の値はそれぞれ768kΩと9.76kΩになります。
ピーク昇圧電流は、インダクタL1を介して電源に流れます。 この電流はR(EXT),により決まりますが、プログラムされた電流制限(ILIM)に対応できるインダクタを選択するように注意が必要です。R(EXT)とILIM との関係は、以下の式によって決まります。
![]()
ここで、K = 10,500、VREF = 1.35V、RINT(ドライバの内部抵抗)= 60Ω、ILIM = L1のピーク電流制限となります。
ドライバ性能を最大限に引き出すには、インダクタの選択が重要です。TIチップの場合、推奨されるインダクタンスの範囲は3.3~22マイクロヘンリー(μH)です。ここでは、ブーストコンバータのスイッチング損失を下げるために大きなインダクタンスを選ぶか、または出力電流を最大化するために小さなインダクタンスを選択するかがトレードオフになります。
ドライバの面から見ると、圧電触覚アクチュエータの重要な電気的仕様は、電圧定格と静電容量です。たとえば、TIドライバの最大周波数500Hzでは、デバイスは200Vpk-to-pk(ドライバの最大電圧振幅能力)で最大50ナノファラッド(nF)を駆動するように最適化されます。プログラムされたブースト電圧が低下した場合や、ユーザーが入力周波数範囲を300Hzに制限したなどの場合、チップはより大きな静電容量を駆動できます。
部品のもう1つの重要な選択は、昇圧コンデンサ(C(BST))です。このコンデンサには、少なくともブースト電圧(それ以上であればさらに良い)の電圧定格が必要です。たとえば、TIチップの最大ブースト電圧105Vで動作する場合、X5RまたはX7Rタイプの定格250Vの100nFコンデンサが推奨されます。C(BST)には、少なくとも50nFの最小動作静電容量が必要です。V(BST)が30~80Vでは、定格100ボルト、100nFのコンデンサが許容されます。また、V(BST)が30ボルト未満の場合、50V、0.22μFのコンデンサが推奨されます。
バルクコンデンサ(CBULK)をインダクタの横に置いて使うことが推奨されます。これはスイッチピンの電流要件によるものです。X5RまたはX7Rタイプのセラミックコンデンサで、静電容量が1μF以上のものが推奨されます。
開発ツール
ハードウェアの作業を始める前にTDKの圧電触覚アクチュエータの機能を試したいと考えるエンジニアのために、同社はシングルチャンネルZ63000Z2910Z 1Z 1 PowerHap評価キットを提供しています。このキットは、ベースボード、昇圧コンバータ、出力ドライバボード、およびマイクロコントローラボードで構成されています。
このキットには、Windows 7(以降)を稼働するPCに対応する構成ソフトウェアが付属しています。ソフトウェアをロードすると、キットがUSBケーブル経由でPCに接続され、12V(DC)の給電が行われます。さらにソフトウェアには、アクチュエータを押したときにアクチュエータから返される触覚応答を設定するためのインターフェースがあります。このインターフェースによって、次の信号パラメータを構成できます(図6)。
- 振幅 - 5~100%(115V)
- 周波数 - 20~300Hz
- 波形(台形波、正弦矩形波、のこぎり波)
- 台形波のデューティサイクル - 35~75%
- パルス計数 - 1~1000
- トリガレベル - 0~12V(トリガレベルが低いほど、アクチュエータを強く押して信号を起動する必要があります)
- 遅延時間(アクチュエータで力が検出されない期間)
 図6:TDKのPowerHap評価キットソフトウェアには、信号設定用のインターフェースがあります。設定したら、[Transmit configuration(設定の送信)]ボタンを使用して設定を評価ボードプロセッサに送信できます。(画像提供:TDK)
図6:TDKのPowerHap評価キットソフトウェアには、信号設定用のインターフェースがあります。設定したら、[Transmit configuration(設定の送信)]ボタンを使用して設定を評価ボードプロセッサに送信できます。(画像提供:TDK)
このソフトウェアでは、エンジニアがカスタム波形も作成できます。ソフトウェアを設定すると、その情報がUSBケーブル経由でキットのプロセッサに送信されます。
もう1つの評価キット、PowerHap Z63000Z2910Z1Z44は、BoréasのBOS1901CQT圧電触覚ドライバを活用するエンジニア向けに特別設計されています。このキットには、ベースボード、昇圧コンバータ、2つのドライバ、マイクロコントローラが含まれています。この基本キットには、TDKの圧電触覚アクチュエータ1台が付属しています(図7)。
 図7:TDKのZ63000Z2910Z1Z44 PowerHap評価キットは、Boréasの圧電触覚ドライバを使用してUSBオーディオプロトコル準拠のため、設定が簡単です。(画像提供:TDK)
図7:TDKのZ63000Z2910Z1Z44 PowerHap評価キットは、Boréasの圧電触覚ドライバを使用してUSBオーディオプロトコル準拠のため、設定が簡単です。(画像提供:TDK)
このボードは、USBケーブル経由でPCに接続して使います。標準のUSBオーディオプロトコルを使用するため、どのコンピュータでも通常のオーディオ出力のように見えます。波形のプロトタイピング(最大190Vpk-to-pk)やプレイバックは、USBオーディオプロトコルを使用して実行でき、MATLAB、Python、Audacityなどのソフトウェアで触覚効果のプロトタイプを作成できます。
結論
圧電、ERM、LRAの各種アクチュエータを使用した触覚フィードバックにより、民生用と産業用の両方の用途でタッチスクリーン制御が向上しています。その一方で、低電圧や小型化を目指す圧電触覚アクチュエータの進化により、高分解能な触覚フィードバックの利点が電池駆動デバイスにも広がっています。
同時に、広く使われているアプリケーションプロセッサとインターフェース接続して幅広い波形をサポートする専用ドライバの登場により、圧電触覚システムの設計が容易になっています。TDKなどのサプライヤから提供されるこれらのデバイス向けの評価キットをいつでも利用できるため、ハードウェア設計を行う前にデバイスを試してプロトタイプを作成することができます。
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、DigiKeyの意見、信念および視点またはDigiKeyの公式な方針を必ずしも反映するものではありません。